品牌西门子
产地德国
可售卖地全国
售后质保一年
结构形式模块式
系统结构及功能
系统包括操作员站、工程师站、自动化系统、网络和现场I/O站等几个部分。
系统各部分功能:
操作员站:提供全汉化人机界面,实现控制系统的操作功能(操作、显示、报表、报警、趋势),并且可以在人机界面上直接查看对应的step7源程序。
工程师站:用于系统的组态和维护。
自动化系统:使用SIMATIC控制器完成回路调节和逻辑运算。
现场I/O站:使用现场总线技术,在设备现场直接采集现场仪表的信号,控制现场的执行机构。
现场总线ProfiBus:用于连接控制单元与操作员站以及管理网络
序列发生器诊断显示
WinCC flexible/ProAgent 和 WinCC/ProAgent1) 同时具有图像和序列发生器诊断的功能。这样用户就可在 HMI 设备上同时激活/故障步骤以及故障原因,如故障转换条件
设备概述
设备概述以表格的形式显示了所有的技术设备和各自的子设备(系统/机器部件)。在此显示中,用户能够识别相应设备正处于哪个操作模式或状态等。如果需要,用户可以更改操作模式。
故障单元由属性标记。
诊断细节显示
诊断详细视图显示了所发生的过程故障的故障操作数和发生时间。当时的状态信息也可作为一种选择予以显示诊断结果或是以梯形图(LAD)语句表(STL)显示,或用符号表显示并为每种显示格式输出来自 S7 符号表的带符号和注释的操作数只显示那些操作数,并加强亮度来标记发生错误的故障属性还可以切换到一个可扫描PLC中所有操作数的当前状态的视图。
运动显示
运动视图用于对调试提供支持每条运动线包含一条注释行,它描述运动(例如X轴),实施运动的二个作用,控制运动用的回检信号以及限制到达的信息(多为16条信息)。
运动可在使用SIMATIC面板和多功能面板的情况下通过侧面的软键进行控制时间要求严格的运动可通过PLC输入直接激活(如果得到目标硬件支持)24V直接控制键,通过PROFIBUS的DP直接控制键)
序列发生器运行显示
序列发生器运行画面为控制序列器发生提供支持。如同S7-GRAPH中的状态/控制,它能提供各种功能,如初始化和确认序列发生器,启动,撤消和递增的单步,以及选取控制方式.步骤以表格形式输出,附有每个步骤的编号和名称。有效和错误的步骤以属性标出,这就为操作人员提供序列发生器当前状态的一个清晰的概貌。
- 在故障定位和矫正方面为设备/机器维护人员提供的支持,
- 增强设备的实用性并且
- 减少了停工时间。
roAgent 6.0 也支持此功能。
提高了产量,使得工程开发费用小化,降低了使用寿命内的成本
ProAgent
许可
运行版软件,每个目标硬件需要一个许可证。
您可以在此处找到有关软件更新服务、许可证类型、在线软件交付以及如何使用自动化许可证管理器
CU310 PN 控制单元专为通信和功率模块的开环/闭环控制功能而设计。 CU310 PN 与功率单元和 CF 卡相组合,形成了功能强大的单轴交流驱动器。 通过 PROFINET IO 提供与更高控制功能的通信链路
处理单元(CPU)有多种 CPU 可供用户选择,有些带有内置的 PROFIBUS-DP 接口,用于各种性能范围。一个控制器可包括多个 CPU,以加强其性能。
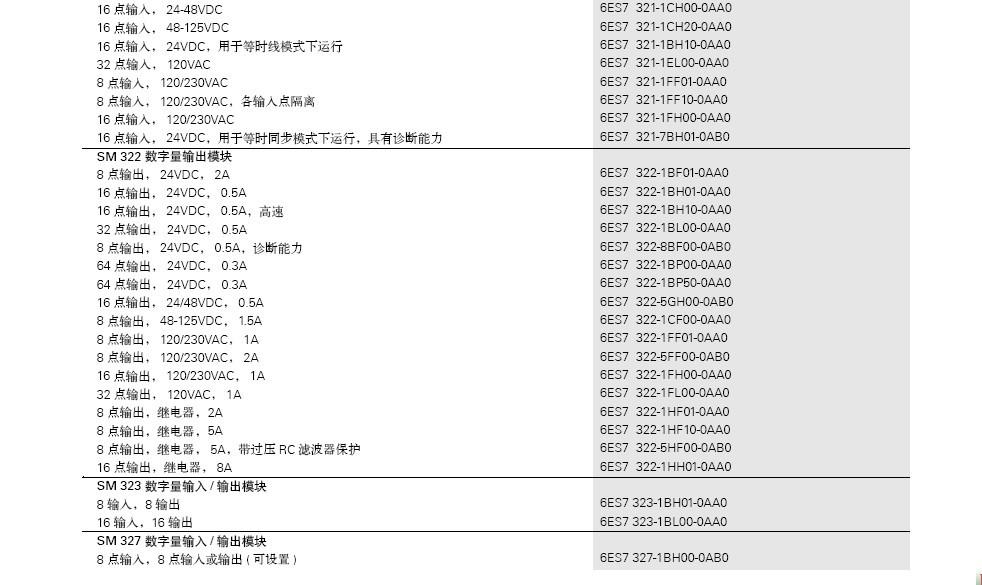
• 各种信号模板(SM)用于数字量输入和输出(DI/DO)以及模拟量的输入和输出(AI/AO)
• 通讯模板(CP)用于总线连接和点到点的连接。
• 功能模板(FM):用于计数、、凸轮控制等任务。根据用户需要还提供以下部件:
• 接口模板(IM),用于连接控制单元和扩展单元。SIMATIC S7-400 控制器多能连接 21 个扩展单元。SIMATIC S7-400 是一种通用控制器
• 由于有很的电磁兼容性和抗冲击、耐振动性能,因而能大限度的满足各种工业标准。模板能带电插、拔。对于分布式扩展架构,用ET200进行分布式扩展:
• 适用于分布范围很广的系统
• 总线结构灵活,满足现场需求
• 通过CPU或者CP卡的PROFIBUS-DP接口多可连接126个总线节点
• 通过CPU或者CP卡的PROFINET接口多可连接256个总线节点
• 根据实际需求可选择ET200SP、ET200S、ET200M、ET200PRO、ET200ECO
DCS控制系统与PLC控制系统区别
DCS指的是控制危险分散、管理和显示集中。60年代末有人研制了作逻辑运算的可编程序控制器(Programmable Logic Controller)。简称PLC。主要应用于汽车制造业。70年代中期以完成模拟量控制的DCS推向市场,代替以PID运算为主的模拟仪表控制。
DCS控制系统与PLC控制系统主要区别在: 一、先是系统和局部的区别;DCS从系统来考虑,有许多特性,如信息的收集和分析; 二、网络连接的紧密程度; 三、冗余方面完整性. 因为目前基本上的PLC都支持现场总线和ETHERNET,所以不能说PLC的开放性比DCS差,而且PLC也有支持C语言的,包含大容量内存,因此实现复杂的算法也是可以的,具体表现在以下方面:
1. DCS是一种“分散式控制系统”,而PLC只是一种(可编程控制器)控制“装置”,两者是“系统”与“装置”的区别。系统可以实现任何装置的功能与协调,PLC装置只实现本单元所具备的功能.
2. 在网络方面,DCS网络是整个系统的**,和利时公司的MACS系统中的系统网采用的是双冗余的100Mbps的工业以太网,采用的标准协议TCP/IP。它是安全可靠双冗余的高速通讯网络,系统的拓展性与开放性更好.
而PLC因为基本上都为个体工作,其在与别的PLC或上位机进行通讯时,所采用的网络形式基本都是单网结构,网络协议也经常与标准不符。在网络安全上,PLC没有很好的保护措施。我们采用电源,CPU,网络双冗余.
3. DCS整体考虑方案,操作员站都具备工程师站功能,站与站之间在运行方案程序下装后是一种紧密联合的关系,任何站、任何功能、任何被控装置间都是相互连锁控制, 协调控制;而单用PLC互相连接构成的系统,其站与站(PLC与PLC)之间的联系则是一种松散连接方式,是做不出协调控制的功能。
4. DCS在整个设计上就留有大量的可扩展性接口,外接系统或扩展系统都十分方便,PLC所搭接的整个系统完成后,想随意的增加或减少操作员站都是很难实现的
5. DCS安全性:为保证DCS控制的设备的安全可靠,DCS采用了双冗余的控制单元,当重要
控制单元出现故障时,都会有相关的冗余单元实时无扰的切换为工作单元,保证整个系统的
安全可靠。PLC所搭接的系统基本没有冗余的概念,就更谈不上冗余控制策略。特别是当其
某个PLC单元发生故障时,不得不将整个系统停下来,才能进行更换维护并需重新编程。所以DCS系统要比其安全可靠性上高一个等级
功能强大的处理器:
该 CPU 的单条二进制命令的命令执行时间可低至 2 ns。
大容量工作存储器:
2 MB,用于程序;8 MB,用于数据
采用 SIMATIC 存储卡作为加装存储器;
允许实现例如数据日志和归档等其它功能
灵活的扩展功能:
单层组态多可支持 32 个模块(CPU + 31 个模块)
PM230 电源模块,防护等级 IP20,穿通型,框架型号 FSA 到 FSC(带控制单元和操作面板)
PM230 电源模块适用于采用泵、风机和压缩机等具有平方特性的设备的应用。这些电源模块没有集成的制动斩波器(单象限应用)。
PM230 电源模块仅生成较低电源谐波和视在功率损耗。除了与电能相关的优点外,还会减轻对环境的影响。
推入式和墙壁安装 - 可并排安装
结构紧凑,可使用更小的机柜
通过推入式安装,更容易对机柜进行冷却
开箱即可使用,*其它选件
在内置的精简型操作员面板 (BOP) 上执行基本操作
框架型号 FSAA 和 FSAB (230 V 1 AC) 与相同功率范围内的框架型号 FSA 相比小 24 %
使用一条电缆将 SINAMICS V20 与终端处的 USS 和 Modbus RTU 相连
便于集成到现有系统中
便于集成到小型自动化系统中
通过标准库和连接宏,调试更方便
用来与控制器进行通信的 Modbus RTU 参数设置具备非常大的灵活性
简便连接到控制系统 (SIMATIC PLC)
可使用动态制动来提高制动性能
变频器 ≥ 7.5 kW 的变频器(底座尺寸 FSD 和 FSE)具有一个集成制动模块。在此情况下,可以直接连接制动电阻器。动态能量以热量形式在制动电阻器中散发,占空比可在 5 % 和 100 % 之间调节
PCU(PC UNIT)是为配合西门子新的操作面板OP10、OP10S、OP10C、OP12、 OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱。PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。PCU的软件被称作HMI, HMI有分为两种:嵌入式HMI和HMI。一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载HMI。
b.OP
OP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031为常用。
c.MCP
MCP是为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种。对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定

S120驱动系统驱动第三方同步伺服电机时,需要确定电气磁位置。对于具有位置信息(如带有编码器或带有C/D信号的增量编码器,或带有两旋转变压器)且已经进行机械校准的同步电机不需要进行磁位置识别。
S120驱动系统驱动第三方同步伺服电机时,需要确定电气磁位置。对于具有位置信息(如带有编码器或带有C/D信号的增量编码器,或带有两旋转变压器)且已经进行机械校准的同步电机不需要进行磁位置识别。除此之外的以下情况均需进行磁位置识别:
1. 未进行机械校准的具有位置信息的同步电机
2. 带有增量编码器(无C/D信号)的同步电机
3. 带有多旋转变压器的同步电机
4. 更换了编码器的同步电机
5. 不带编码器的同步电机
对于第三方具有位置信息的同步伺服电机和更换了编码器或带有C/D信号的增量编码器或两旋转变压器的同步电机需要进行一次性磁位置识别,设置如下:
1. 通过 p1980 选择一个方法。
2. 设置 p1990 = 1,启动一次性磁位置识别。
---在给出下一个脉冲使能信号时会执行测量,并将测出的角度差(p1984)记录在p0431 中,辨识完成后P1990会自动变回0。需要执行“copy RAM to ROM”的操作以保存参数。
对于带有增量编码器(无C/D信号)或多旋转变压器的同步电机以及不带编码器的第三方同步伺服电机需要进行磁位置识别,设置如下:
1. 通过 p1980 选择一个方法。
2. 设置 p1982 = 1,启动磁位置识别。
---在每一次给出脉冲使能信号后都会执行一次磁位置识别。
控制单元 CU320‑2
CU320‑2 控制单元用于多个传动装置。此时,以下设备可通过控制单元 CU320‑2 运行。
•V/f 模式下多 12 个转动装置,或
•伺服或矢量控制模式下组多 6 个传动装置。
CU320-2 控制单元可用于在多个传动装置间建立连接,并实现简单工艺功能。
SIMOTION D 控制单元
SIMOTION D 控制单元用于实现协调运动控制,如同步运行、电子齿轮、凸轮或复杂工艺功能。
SIMOTION D 控制单元具有一系列性能型号:
•SIMOTION D410-2,用于控制 1 到 3 个轴
•SIMOTION D425‑2,用于控制多 16 个轴
•SIMOTION D435‑2,用于控制多 32 个轴
•SIMOTION D445‑2,用于控制多 64 个轴
•SIMOTION D455‑2,用于控制多 128 个轴
STARTER 调试工具用于对各种类型控制单元进行调试和诊断。SIMOTION D 控制单元需要使用 SCOUT 工程软件(包含 STARTER 工具)。
STARTER 和 SCOUT 的详细信息,请参见“工程组态软件”和“SIMOTION 运动控制系统”。
的 SINAMICS S120 传动系统由一个 CU310 2 控制单元和一个变频装置组成。变频装置中集成有一个进线整流器、一个直流回路和一个用于为电机供电的逆变器。
CANopen是CIA定义的基于CAN总线和CAL的通信模型。 它使得在同一总线上使用不同厂家生产的设备变的更加容易,CAL中自动化应用功能的子集被定义为CANopen通信协议CIA DS 301。
在哪里可以找到关于CANopen通讯的相关信息?
CANopen是一种“面向消息的总线”(而不是“面向节点的总线”),即传输消息到总线的决定仅取决于总线节点本身。一条消息可以不通过总线节点传输,也可以通过一个或多个总线节点传输。CAN网络是基于消息分配系统原理的。 这意味着传输到总线的消息通常都可以用于所有网络节点,并由它们的CAN控制器(硬件)接收。在CAN控制器中实现的接收/消息过滤

电机数据计算
P340是基于电机铭牌数据的计算(定/转子阻抗感抗等)该过程不必使能变频器。计算结束后P340自动恢复为0。
b.电机数据静态辨识
P1910用于电机数据静态辨识,该过程需要使能变频器。辨识过程中
1. 变频器有输出电压,输出电流,
2. 电机可能转动大210?
P1910 = -3 接受识别结果
P1910 = -2 辨识过程中,若变频器发现编码器反向则报故障F07933,此时应检查电机或编码器方向若正确则设定P1910= -2接受正确方向。若不正确则需修改电机接线并重新执行辨识过程。
P1910 = -1数据辨识但不接受
P1910 = 0 禁止数据辨识
P1910 = 1 数据辨识并接受辨识结果
P1910=1 将计算:定子冷态阻抗P350、转子冷态阻抗P354、定子漏感P356、转子漏感P358、主电感P360。
电机数据静态辨识步骤:
i. 设P1910=1
ii. 使能 ON/OFF1
辨识结束后P1910自动恢复为0
速度环动态特性的优化:
依照实际工艺要求使用STARTER 中的Trace 功能优化速度P1460/P1470、P1662/P1472(调试方法参照《SINAMICS S120 快速入门》)
c.电机数据动态辨识
电机数据动态辨识由P1959 + P1960配合使用
出厂默认值P1959. 1、2、5、6、7、9、10 都已激活
P1960 = -3 接受识别结果
P1960 = -2 辨识过程中,若变频器发现编码器反向则报故障F07933,此时应检查电机或编码器方向若正确则设定P1910= -2接受正确方向。若不正确则需修改电机接线并重新执行辨识过程。
P1960 = -1数据辨识但不接受
P1960 = 0 禁止数据辨识
P1960 = 1 数据辨识并接受辨识结果
电机数据动态辨识,需要使能变频器。辨识过程将完成:
? 计算磁化曲线
? 计算系统转动惯量与电机转动惯量比例(P342)等
动态辨识步骤:
1. 电机空载以计算电机动态数据(如电机的转动惯量等)。
2. 电机带载优化,带载后系统总的转动惯量等发生变化需执行p1959=4, P1960=1以完成动态优化。
3. 如果项目配置时选择了扩展的给定通道(Extended Setpoint)斜坡函数发生器有效,建议在做空载优化时通过设置P1958=0 取消(P1958仅在电机数据动态辨识时有效),同时不要使用旋转方向禁止功能P1959.14=1、P1959.15=1。
4. 若电机带载后需要测试系统转动惯量,则需根据负载及机械设备的实际情况设定斜坡上升下降时间P1958≠0,然后执行P1960=1、P1958=4,优化过程中只有电流及速度限幅有效。
5. 选择优化项目
设P1960+P1959
使能 ON/OFF1
电机辨识过程中电机会加速至大转速,优化过程中只有大电流P640和大转速P1082有效,辨识结束后P1960自动恢复为0。
注:若机械系统没有条件执行电机空载优化,可直接进行带载优化,此时必须考虑机械条件限制如:
机械负载惯性
机械强度
运动速度
位移的限制等
对于**种情况(机械负载惯性、机械强度、运动速度)可适当调整P1958、P640、P1082,通过使用斜坡上升/下降时间、速度限制、电流限制来减少机械承受的压力做保护。
对于*四种情况(机械位置有限制)则好不做动态优化或可通过P1959.14和P1959.15做限位。
优化完成后必须存储参数到CF卡上:
可通过STARTER调试软件执行 copy RAM to ROM或设定参数P971=1、P977=1
S120驱动第三方伺服电机必要的电机数据:
P305、P311、P314、P316、P322、P323、P400、P341、P350、P353、P356
如果电源模块不具备再生回馈能力,则要在掉电(例如紧急停机)
情况下使驱动受控停止运转,或者要限制短暂制动下的直流母线
电压,就必须使用制动模块和配套的外部制动电阻。
制动模块含有功率电子器件和对应的控制回路。在运行中由外部
制动电阻将直流母线的能量转换为热损耗。
制动模块立于变频器控制自行工作。
可以让多个制动模块同时运行,在每个制动模块上必须连接一个
单的制动电阻。
制动模块集成在风冷型式电机模块、电源模块或功率模块中,并
通过这些模块上的风扇冷却。电子元器件由直流母线供电。制动
模块通过供货范围内的母排套件或柔性电缆连接直流母线,若采
用结构尺寸为 GB 或者 GD 的基础电源模块,则通过单的预装
配电缆套件连接直流母线。
制动模块的动作阈值由 DIP 开关调节。技术规格中给出的制动功
率值针对的是动作阈值上限
设计
标准配置的制动模块配备有以下接口:
• 1 个直流母线接口
• 1 个制动电阻接口
• 1 路数字量输入 (禁用制动模块 / 应答故障)
• 1 路数字量输出 (制动模块已禁用)
• 1 个 DIP 开关,用于调节动作阈值
模块型功率模块 PM240-2 标配有以下接口:
• 电源连接
• PM-IF
接口用于连接
PM240-2
功率模块和
CU310-2/SIMOTION D410-2 控制单元或者 CUA31/CUA32 控
制单元适配器。PM240-2 功率模块也负责通过集成的电源件为
CU310-2/SIMOTION D410-2 控制单元或 CUA31/CUA32 控制
单元适配器供电
• 端子 DCP/R1 和 R2,用于连接外部制动电阻
• 通过螺钉式接线端子或螺栓进行电机连接
• “ 安全制动继电器 ” 的控制回路,用于控制抱闸
• 2 个 PE / 保护接地线接口
未集成进线滤波器的功率模块适于连接至接地的 TN/TT 供电系
统,以及未接地的 IT 供电系统。集成有进线滤波器的功率模块仅
适合连接带接地中性点的 TN 供电系统
集成
PM240-2 模块型功率模块通过 PM-IF 接口与以下组件进行通信
• CU310-2 控制单元
• 控制单元适配器 CUA31
借助于卡装的 CUA31 控制单元适配器, PM240-2 功率模块通过
DRIVE-CLiQ 连接与以下组件进行通信
• 一个 CU320-2 控制单元
• 一个 SINUMERIK 840D sl 带
NCU 710.3B PN/NCU 720.3B PN/NCU 730.3B PN
功率和直流母线组件的规格选择取决于所使用的功率模块
依照功率模块的外形尺寸,可订购下列进线侧电源组件、直流母
线组件和输出侧组件。
制动电阻,适用于外形尺寸为 FSD 的功率模块 PM240-2
直流母线中的多余电能在制动电阻中消耗。PM240-2 功率模块集
成了制动斩波器,且不具备将再生能量回馈至供电系统的能力,
因此西门子推出了与其搭配使用的制动电阻。在再生式运行中
(例如高转动惯量转动的负载制动时),必须连接制动电阻,从而
将产生的能量转化为热能。
制动电阻可以安装在 PM240-2 功率模块的侧面
适用于 FSD 至
FSF 外形尺寸的功率模块的制动电阻应安装在控制柜或控制室
外,以便传导功率模块产生的热损耗。因此,降低了对空气调节
能力的要求
http://zhangqueena.b2b168.com