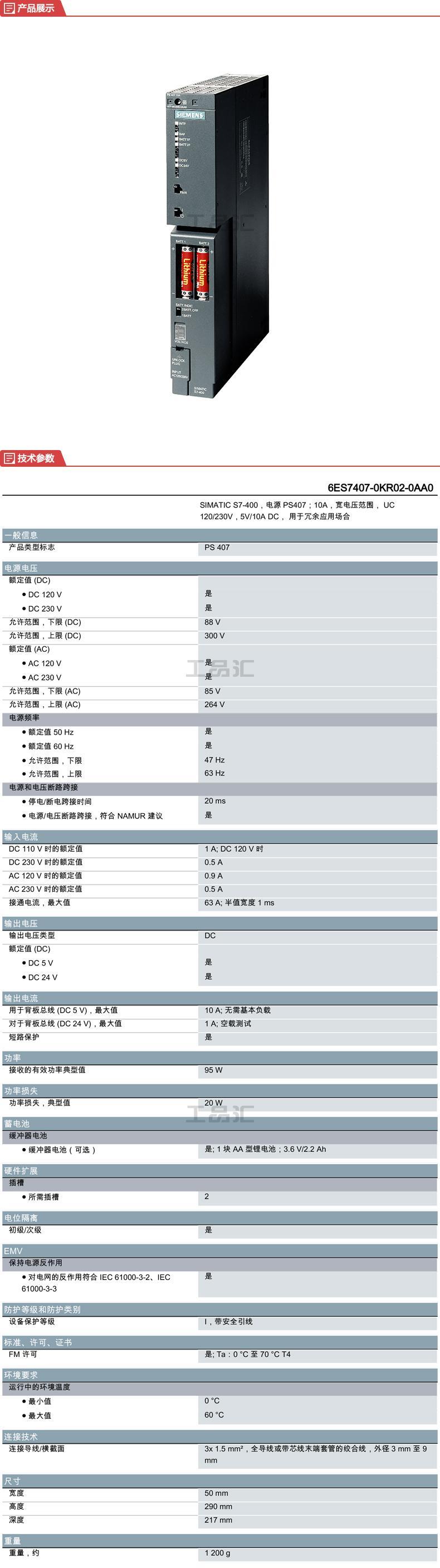
系列S7-400
是否进口是
产品认证CE
结构形式:模块
安装方式:现场安装
功能:PLC/CPU
品牌西门子
运行模式
CPU的F程序和故障安全信号模板中包含有S7-400F/FH的安全功能。
使用差异分析和测试信号,信号模板可以监视输出和输入信号。
CPU通过常规的自检、监测和逻辑命令以及程序定时检测,检查运行的正确性。 此外,通过申请信号进行检测。
当系统诊断出一个故障时,系统将进入安全状态。
F 运行版授权
CPU 417-4H必须装在F运行授权才能运行S7-400F/FH。每个 S7-400F/FH 系统需要 1 个授权。
编程
S7-400F/FH 的编程方法同其他 SIMATIC S7 编程方法相同。 通过诸如STEP 7编程工具编写非故障安全用户程序。
S7 F 系统选件包
"S7 F Systems" 软件包用来编写故障安全程序。 软件包包含生成F程序所需的所有功能和部件。 S7 F系统运行必须将下列软件包装载到PG或PC:
STEP 7 V5.1 以上
CFC V5.23 或新版本
S7-SCL V5.1 SP 1 或新版本
S7 H Systems Version 5.1 (S7-400FH的选件)
功能块通过CFC从F库中进行调用,并为包含安全功能的F程序互连。
设计
CPU 412-1 和 CPU 412-2 的特点:
功能强大的处理器:
CPU 对每个二进制指令的执行时间可短到 0.75 µs。
CPU 412-1:288 KB RAM (其中,程序和数据各使用 144 KB);
CPU 412-2:512 KB RAM (其中,程序和数据各使用 256 KB);
快速 RAM 用于执行部分用户程序
灵活扩展:
536 个数字量以及 4096 个模拟量输入/输出。
MPI多点接口:
通过 MPI,可将多 32 个站连成简单网络,数据传输速率高达 12 Mbit/s。CPU 可与通讯总线(C 总线)和 MPI 的站之间建立多 16 个连接。
模式选择开关:
波动开关设计。
诊断缓冲区:
后的120个故障和中断事件保存在一个环形缓冲器中,用于进行诊断。可以对输入数目进行设定。
实时时钟:
日期和时间附加在 CPU 的诊断消息后面。
存储卡:
用于扩展内置的装载存储器。存储在装载存储器中的信息包括S7-400参数数据以及程序,因此需要2倍的存储空间。其结果是:
内置装载存储器的容量显著提高,因此,基本上不需要存储器卡。
CPU 412-2 还具有:
PROFIBUS-DP 接口和组合的MPI/DP 接口:
通过 PROFIBUS DP 主站接口,可以实现分布式自动化组态,从而提高了速度,便于使用。对用户来说,分布式I/O单元可作为一个集中式单元来处理(相同的组态、编址和编程).
SITOP – 可靠的 24-V 电源
机器与设备的运行需要使用可靠、恒定的电源。SITOP 稳压电源质量优异,性能可靠,可确保在工业环境中以及楼宇管理系统中使用时达到很高的安全性。除了能提供稳定的 24 V 电压外,它们还可提供其他输出电压。即使输入电压变化很大,也可以很高的准确度保持输出电压稳定。这样,就可在众多应用中使用初级开关电源,以便为灵敏电子系统直至需要高达 40 A 电流的负载供电。
通过 CP 实现数据通信(点到点)
通过 CP 441 通信处理器,可以实现功能强大的点到点连接。
可连接各种设备,例如:
PC
SIMATIC S5/S7
工业 PC
其它厂商的 PLC
扫描仪、条形码阅读器、识别系统
机械手控制装置
打印机
可变接口:
通过可更换的接口模块,可以使用不同传输介质进行通信:
20 mA (TTY)
RS 232C (V.24)
RS 422/485
通过 CP(PROFIBUS 或工业以太网)实现数据通信
通过 CP 443-x 通信处理器,可以将 SIMATIC S7-400 连接至 PROFIBUS 和工业以太网总线系统。
编程设备
PC
SIMATIC HMI 人机界面系统
数控装置
机械手控制装置
工业 PC
驱动控制装置
其它厂商的设备
S7-400H
SIMATIC S7-400H 包括以下组件:
2 个控制器:
2 个单的 UR1/UR2 控制器,或一个分隔式控制器 (UR2-H) 上的 2 个区域。
每个控制器有两个同步模块,用于通过光缆连接两个设备。
每个控制器 1 个 CPU 412-5H、1 个 CPU 414-5H、1 个 CPU 416-5H 或 1 个 CPU 417-5H。
控制器中具有 S7-400 I/O 模块。
UR1/UR2/ER1/ER2 扩展单元和/或带有 I/O 模块的 ET 200M 分布式 I/O 设备。
功能采用冗余设计。可将 I/O 组态为常规可用性型和切换型。
电源接线PLC供电电源为50Hz、220V±10%的交流电。FX系列可编程控制器有直流24V输出接线端。该接线端可为输入传感(如光电开关或接近开关)提供直流24V电源。如果电源发生故障,中断时间少于10ms,PLC工作不受影响。若电源中断**过10ms或电源下降**过允许值,则PLC停止工作,所有的输出点均同时断开。当电源恢复时,若RUN输入接通,则操作自动进行。对于电源线来的干扰,PLC本身具有足够的能力。如果电源干扰特别严重,可以安装一个变比为1:1的隔离变压器,以减少设备与地之间的干扰。
3.接地良好的接地是保证PLC可*工作的重要条件,可以避免偶然发生的电压冲击危害。接地线与机器的接地端相接,基本单元接地。如果要用扩展单元,其接地点应与基本单元的接地点接在一起。为了抑制加在电源及输入端、输出端的干扰,应给可编程控制器接上地线,接地点应与动力设备(如电机)的接地点分开。若达不到这种要求,也必须做到与其他设备公共接地,禁止与其他设备串联接地。接地点应尽可能*近PLC
4.直流24V接线端使用无源触点的输入器件时,PLC内部24V电源通过输入器件向输入端提供每点7mA的电流。PLC上的24V接线端子,还可以向外部传感器(如接近开关或光电开关)提供电流。24V端子作传感器电源时,COM端子是直流24V地端。如果采用扩展船员,则应将基本单元和扩展单元的24V端连接起来。另外,任何外部电源不能接到这个端子。如果发生过载现象,电压将自动跌落,该点输入对可编程控制器不起作用。
每种型号的PLC的输入点数量是有规定的。对每一个尚未使用的输入点,它不耗电,因此在这种情况下,24V电源端子向外供电流的能力可以增加。FX系列PLC的空位端子,在任何情况下都不能使用。
5.输入接线PLC一般接受行程开关、限位开关等输入的开关量信号。输入接线端子是PLC与外部传感器负载转换信号的端口。输入接线,一般指外部传感器与输入端口的接线。输入器件可以是任何无源的触点或集电极开路的NPN管。输入器件接通时,输入端接通,输入线路闭合,同时输入指示的发光二极管亮。输入端的一次电路与二次电路之间,采用光电耦合隔离。二次电路带RC滤波器,以防止由于输入触点抖动或从输入线路串入的电噪声引起PLC误动作。若在输入触点电路串联二极管,在串联二极管上的电压应小于4V。若使用带发光二极管的舌簧开关,串联二极管的数目不能**过两只。另外,输入接线还应特别注意以下几点:
(1)输入接线一般不要**过30m。但如果环境干扰较小,电压降不大时,输入接线可适当长些。
(2)输入、输出线不能用同一根电缆,输入、输出线要分开。
(3)可编程控制器所能接受的脉冲信号的宽度,应大于扫描周期的时间。
6.输出接线
(1)可编程控制器有继电器输出、晶闸管输出、晶体管输出3种形式。
(2)输出端接线分为立输出和公共输出。当PLC的输出继电器或晶闸管动作时,同一号码的两个输出端接通。在不同组中,可采用不同类型和电压等级的输出电压。但在同一组中的输出只能用同一类型、同一电压等级的电源。
(3)由于PLC的输出元件被封装在印制电路板上,并且连接至端子板,若将连接输出元件的负载短路,将烧毁印制电路板,因此,应用熔丝保护输出元件。
(4)采用继电器输出时,承受的电感性负载大小影响到继电器的工作寿命,因此继电器工作寿命要求长。
(5)PLC的输出负载可能产生噪声干扰,因此要采取措施加以控制。此外,对于能使用户造成伤害的危险负载,除了在控制程序中加以考虑之外,还应设计外部紧急停车电路,使得可编程控制器发生故障时,能将引起伤害的负载电源切断。交流输出线和直流输出线不要用同一本电缆,输出线应尽量远离高压线和动力线,避免并行。
PLC的发展趋势
1、功能向增强化和化的方向发展,针对不**业的应用特点,开发出化的PLC产品。以此来提高产品的性能和降低产品的成本,提高产品的易用性和化水平。
2、规模向小型化和大型化的方向发展,小型化是指提高系统可靠性基础上,产品的体积越来越小,功能越来越强;大型化是指应用在工业过程控制领域较大的应用市场,应用的规模从几十点扩展到上千点,应用功能从单一的逻辑运算扩展几乎能满足所有的用户要求。
3、系统向标准化和开放化方向发展,以个人计算机为基础,在WINOOWs平台上开发符合全新一体化开放体系结构的PLC。
通过提供标准化和开放化的接口,可以很方便地将PLC接入其它系统[2]。
PLC的功能特点
PLC的功能 随着自动化技术、计算机技术及网络通信技术的迅速发展,PLC的功能日益增多。它不仅能实现单机控制,而且能实现多机制;不仅能实现逻辑控制,还能实现过程控制、运动控制和数据处理等,其主要功能如下:
1、开关量逻辑控制
这是PLC的基本的功能。PLC具有强大的逻辑运算能力,它提供了与、或、非等各种逻辑指令,可实现继电器触点的串联、并联和串并联等各种连接的开关控制,常用于取代传统的继电器控制系统。使用PLC提供的定时、计数指令,可实现定时、计数功能,其定时值和计数值既可由用户在编程时设定,也可用数字拨码开关来设定,其值可进行在线修改,操作十分灵活方便。
2、模拟量控制
在工业生产过程中,有许多连续变化的量,如温度、压力、流量、液位和速度等都是模拟量。PLC提供了各种智能模块,如模拟量输入模块、模拟量输出模块、模拟量输入输出模块、热电阻用模拟量输入模块、热电阻用模拟量输出模块等,通过使用这些模块,把现场输入的模拟量经A/D转换后送CPU处理;而CPU处理的数字结果,经D/A转换成模拟量去控制被控设备,以完成对连续量的控制。
3、闭环过程控制
使用PLC不仅可以对模拟量进行开环控制,而且还可以进行闭环控制。配置PID控制单元或模块,对控制过程中某一变量(如速度、温度、电流、电压等)进行PID控制。
4、定时、定位、计数控制
PLC具有定时控制的功能,它为用户提供了若干个定时器,定时器的时间可以由用户在编写程序时设定,也可以用拨盘开关在外部设定,实现定时或延时控制。定位控制是PLC不可缺少的控制功能之一。PLC提供了定位模块、脉冲输出模块等智能模块,以实现各种需求的定位控制。PLC具有计数控制的功能,它为用户提供了若干个计数器或高速计数模块。计数器的计数值可以由用户在编写程序时设定,也可以用拨盘开关在外部设定,实现计数控制。、 5、顺序(步进)控制
在工业控制中,选用PLC实现顺序控制,可以采用IEC规定的用于顺序控制的标准化语言——顺序功能图进行设计,可以用移位寄存器和顺序控制指令编写程序。
6、网络通信
现代PLC具有网络通信的功能,它既可以对远程I/O进行控制,又能实现PLC与计算机之间的通信,从而构成“集中管理,分散控制”的分布式控制系统,实现工厂自动化。PLC通过RS232接口可与各种RS232设备进行通信。PLC还可与其它智能控制设备(如变频器、数控装置)实现通信。PLC与变频器组成联合控制系统,可提高交流电动机的自动化控制水平。
7、数据处理
现代PLC具有数算(含矩阵运算、函数运算、逻辑运算)、数据传送、数据转换、排序、查表、位操作等功能,可以完成数据的采集、分析及处理。 这些数据可以与存储在存储器中的参考值比较,完成一定的控制操作,也可以利用通信功能传送到别的智能装置,或将它们打印制表[2]。

每个控制器两个同步 模块 ,用于通过光缆连接两个设备。 每个控制器 1 个 CPU 412-3H、1 个 CPU 414-4H 或 1 个 CPU 417-4H。 控制器中具有 S7-400 I/O 模块 。 UR1/UR2/ER1/ER2 扩展单元和/或带有I/O 模块 的 ET 200M 分布式 I/O 设备。 重要的功能始终采用冗余型设计。 I/O可以组态为常规可用性型和switched型。 常规可用I/O(单边组态) 在单边组态中,I/O 模块 为单通道设计,仅能由两个控制器中的一个来寻址。单边I/O 模块 可以插接 一个控制器和/或 扩展单元/分布式I/O设备 . 在I/O寻址设备工作正常的情况下,从单边读入的信息始终可以被两个控制器使用。在出现故障的情况下,受到影响的控制器的I/O 模块 将会停止工作。 单边组态用于: 不需要很高可用性的工厂部分。 连接基于用户程序的冗余 I/O。此时,系统必须具有一种对称设计。 增加可用性(倒换型配置) 在switched组态中,I/O 模块 为单通道设计,但是其寻址工作是由两个控制器通过冗余PROFIBUS DP完成。Switched I/O 模块 仅能插接 一个ET 200M分布式I/O设备 . 至控制器的连接通过PROFIBUS DP实现。此时,switched ET 200M连接至两个子单元上。 I/O 的冗余性 3.1版以及更高版本的操作系统均支持冗余I/O。 冗余 I/O 模块 以冗余方式成对配置。使用冗余I/O可以实现可用性的大化,因为这种工作模式能够容忍一个CPU、PROFIBUS或者信号 模块 出现故障。 配置选项 可进行下列配置: 针对单侧 DP 从站采用冗余 I/O 针对切换式 DP 从站采用冗余 I/O 适宜的 I/O 模块 彼此冗余的 模块 的类型必须相同,且采用相同的设计(例如,均为集中式或者均为分布式)。插槽不强制规定。不过,出于可用性原因,建议在不同的站中使用。关于可以使用哪些 模块 ,请咨询用户支持部门或者参考相关手册。 FM 和 CP 的冗余 这两种不同的组态都可以以冗余方式使用功能 模块 (FM)和通信处理机(CP): 切换冗余设计: 功能 模块 (FM)/通信处理机(CP)可以成双地连接至单个ET 200M或者一个switched ET 200M。 双通道冗余设计: 功能 模块 (FM)/通信处理机(CP)可以插接两个子单元或者子单元所连接的扩展单元(参见单边组态)
此时可以不同方式取得 模块 的冗余性: 由用户编程: 在功能 模块 和SIMATIC通信处理机上,总体上说,用户可以对其冗余功能进行编程。识别出主动 模块 ,当检测到可能出现故障时启动切换操作。所需要的程序与用于配有冗余FM/CP的单个CPU的程序相一致: 由操作系统直接支持。 对于SIMATIC NET-CP 443-1,冗余由操作系统直接支持。详细信息,参见下面的“通信”。 S7-400 F/FH 故障安全型 S7-400 F/FH自动化系统可以根据需求进行不同的组态: S7-400 F的单通道单侧I/O 工厂需要使用故障安全型控制器。*容错。需要下列部件: 1 CPU 414-4H/417-4H,含 F-Runtime 许可证。 1 PROFIBUS DP 连接线。 ET 200M,配有IM 153-2。 故障安全信号 模块 ,非冗余型。 在发生故障的情况下,I/O不可用。故障安全信号 模块 为被动型。 单通道switched I/O,用于 S7-400 FH 工厂需要使用故障安全型控制器。对于 CPU 需要容错
需要下列部件: 2 CPU 414-4H/417-4H,含 F-Runtime 许可证。 2 根 PROFIBUS DP 连接线。 1 个 ET 200M ,带 2 个 IM 153-2 (冗余)。 故障安全信号 模块 ,非冗余型。 在CPU、IM 153-2或者PROFIBUS DP连接线出现故障的情况下,控制器仍然保持可用状态。在故障安全信号 模块 或者ET 200M出现故障的情况下,I/O不再可以使用。故障安全信号 模块 为被动型。 冗余switched I/O,用于 S7-400 FH 工厂需要使用故障安全型控制器。在CPU侧和I/O侧,必须实现容错功能。需要下列部件: 2 CPU 414-4H/417-4H,含 F-Runtime 许可证。 2 根 PROFIBUS DP 连接线。 2 个 ET 200M ,带 2 个 IM 153-2 (冗余)。 故障安全信号 模块 ,冗余型。 CPU、IM 153-2或者PROFIBUS DP连接线、故障安全信号 模块 或者ET 200M出现故障的情况下,控制器仍然保持可用状态
插入的一个CPU315-2DP,作为主站;一个CUP317-2作为从站,并且使用317-2的*个端口MPI/DP端口配置成DP口来实现和315-2DP的通讯。然后分别对每个站进行硬件组态:先对从站CPU317-2进行组态:将317的*个端口MPI/DP端口组态为PROFIBUS类型,并且创建一个不同于CPU自带DP口的PROFIBUS网络,设定地址。在操作模式页面中,将其设置为DPSLAVE模式,并且选择“Test,commissioning,routing”,是将此端口设置为可以通过PG/PC在这个端口上对CPU进行,以便于我们在通讯链路上进行程序。下面的地址用默认值即可。
然后选择Configuration页面,创建数据交换映射区。这里我们创建了2个映射区,图中的红色框选区域在创建时是灰色的,包括上面的图中的Partner部分创建时也是空的,在主站组态完毕并编译后,才会出现图中所示的状态。由于我们这里只是演示程序,所以创建的交换区域较小。组态从站之后,再组态主站。插入CPU时,不需要创建新的PROFIBUS网络,选择从站建立的*二条(也就是准备用来进行通讯的MPI/DP端口创建的那条)PROFIBUS网络即可。组态好其它硬件,确认CPU的DP口处于主站模式,从窗口右侧的硬件列表中的已组态的站点中选择CPU31X,拖放到主站的PROFIBUS总线上,
这时会弹出链接窗口,选择以组态的从站,点击Connect按钮,然后进入Configuration页面,可以看到前面在从站中设定的映射区域,逐条进行编辑(Edit…),确认主从站之间的对应关系。主站的输入对应从站的输出,主站的输出对应从站的输入。至此,硬件的组态完成,将各个站的组态信息下载到各自的CPU中
在程序中插入数据区DB1,前面我们只建立了2个字(2Word)的映射区,于是我们建立如下内容的DB1,为了查看的方便,DB1的前半部分作为接收数据的存储区,后半部分用作发送数据的存储区。在317和315中我们插入同样的DB1,然后分别在OB1中编写通讯程序。其中,程序的LADDR地址,对应的是硬件的映射区组态时本站的LocalAddr中的地址,从站的LocalAddr我们组态的是0,对应的PartnerAddr也就是主站的地址是4。需要注意的是这里的地址是需要用16进制的格式来表示的,我们组态时是用10进制表示的。
完成之后,我们在各站中插入OB82、OB86、OB122等程序块,这些是为了保证当通讯的一方掉电时,不会导致另一方的停机。完成之后,将所有的程序分别下载到各自的CPU中,个站切换到运行状态,通过PLC功能,设定数据之后,我们的结果如下:上面的表格内容为主站315的数据,下面的是从站317的数据。可以看到,两个站都分别将各自的DBB4—DBB7数据发送出去并被另一方成功接收后存储在各自的DBB0—DBB3中。验证中,我们将一个站的CPU切换到STOP状态,可以看到,另一个站的CPU硬件SF指示灯报警,但PLC正常运行不停机。待该站恢复之后,报警自动消失。
SNMP(简单网络管理协议)是用于以太网网络基础结构诊断的标准化协议。 在办公设置和自动化工程中,许多不同制造商的设备均支持以太网上的 SNMP。 基于 SNMP 的应用程序和使用 PROFINET 的应用程序可同时在同一网络上运行。
SNMP OPC 服务器的组态集成在 STEP 7 硬件组态应用程序中。 可以直接传输 STEP 7 项目中已完成组态的 S7 模块。 作为 STEP 7 的替代,也可使用 NCM PC(包含在 SIMATIC NET CD 上)来执行组态。 所有以太网设备均可通过它们的 IP 地址和/或 SNMP 协议 (SNMP V1) 进行检测并传送到组态。
使用配置文件 MIB_II_V10。
基于 SNMP 的应用程序与使用 PROFINET 的应用程序可同时在同一网络上运行。
提示
MAC 地址
在 SNMP 诊断期间,从 FW V5.1 开始 ifPhysAddress 参数将显示下列 MAC 地址:
接口 1(PN 接口)= MAC 地址(在 CPU 的前面板上)
接口 2(端口 1)= MAC 地址 + 1
接口 3(端口 2)= MAC 地址 + 2
人机交换界面负责NC数据的输入和显示,它由MMC和OP组成MMC(ManMachineCommunication)包括:OP(Operationpanel)单元,MMC,MCP(MachineControlPanel)三部分。MMC实际上就是一台计算机,有自己立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
(1)、MMC(Man Machine communication)
常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.PCU(PCUNIT)是为配合西门子新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70,PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWSNT的。PCU的软件被称作HMI。
HMI有分为两种:嵌入式HMI和HMI。一般标准供货时,PCU20装载的是嵌入式HMI,而PCU50和PCU70则装载HMI。
(2)OP(Operation pannel)
OP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031为常用。
(3)、MCP(Machine control pannel)
MCP是为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种。对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定。
对于SINUMERIK840D应用了MPI(MultiplePointInterface)总线技术,传输速率为187.5k/秒,OP单元为这个总线构成的网络中的一个节点。为提高人机交互的效率,又有OPI(OperatorPanelInterface)总线,它的传输速率为1.5M/秒。
2. NCU(Numerical control unit)数控单元
SINUMERIK840D的数控单元被称为NCU(NumenricalControlunit)单元(在810D中称为CCU(compactcontrolunit)):控制单元,负责NC所有的功能,机床的逻辑控制,还有和MMC的通讯它由一个COMCPU板.一个PLCPU板和一个DRIVE板组成.
根据选用硬件如CPU芯片等和功能配置的不同,NCU分为NCU561.2,NCU571.2,NCU572.2,NCU573.2(12轴),NCU573.2(31轴)等若干种,同样,NCU单元中也集成SINUMERIK840D数控CPU和SIMATICPLCPU芯片,包括相应的数控软件和PLC控制软件,并且带有MPI或Profibus接口,RS232接口,手轮及测量接口,PCMCIA卡插槽等,所不同的是NCU单元很薄,所有的驱动模块均排列在其右侧。
http://zhangqueena.b2b168.com

























