品牌西门子
结构形式模块式
厂家德国
安装方式现场安装
功能工业
可售地区全国
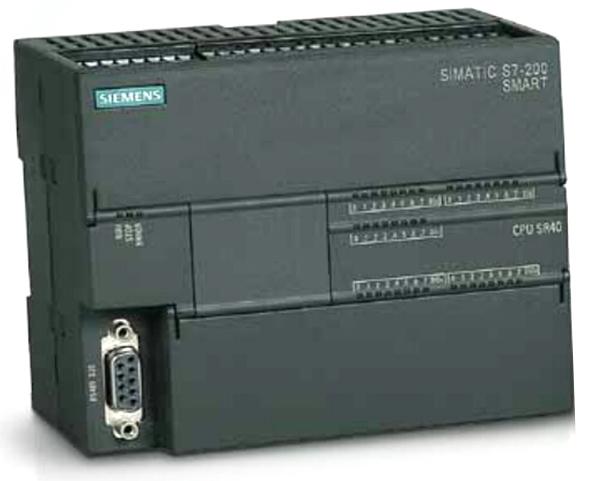
系列S7-200SMART
产品认证CE
结构形式:模块
安装方式:现场安装
功能:PLC/CPU
产品认证:CE
加工定制:否
订货号6ES7288开头
产品用途控制设备
规格合格
销售范围全国
送达方式快递
质保时长一年
S7-200 SMART CPU 模块本体直接提供三轴100KHz 高速脉冲输出,通过强大灵活的设置向导可组态为PWM输出或运动控制输出,为步进电机或伺服电机的速度和位置控制提供了统一的解决方案,满足小型机械设备的定位需求。
S7-200 SMART CPU 模块本体集成1 个以太网接口和1 个RS485 接口,通过扩展CM01 信号板,其通信端口数量多可增至3 个,可满足小型自动化设备与触摸屏、变频器及其它第三方设备进行通信的需求。
以太信所有CPU 模块配备以太网接口,支持西门子S7 协议、有效支持多种终端连接 可作为程序下载端口(使用普通网线即可)? 与SMART LINE 触摸屏进行通信,多支持8 台设备? 通过交换机与多台以太网设备进行通信,实现数据的快速交互,包含8 个主动GET/PUT 连接、8 个被动 GET/PUT 连接。
串口通信S7-200 SMART CPU 模块均集成1 个RS485 接口,可以与变频器、触摸屏等第三方设备通信。如果需要额外的串口,可通过扩展CM01 信号板来实现,信号板支持RS232/RS485 自由转换,多支持4 个设备。串口支持下列协议 Modbus RTU? PPI? USS? 自由口通信
与上位机的通信通过PC Access SMART*,操作人员可以轻松通过上位机读取S7-200 SMART 的数据,从而实现设备或者进行数据存档管理。(PC Access SMART 是为 S7-200 SMART 与上位机进行数据交互而定制开发的OPC 服务器协议)
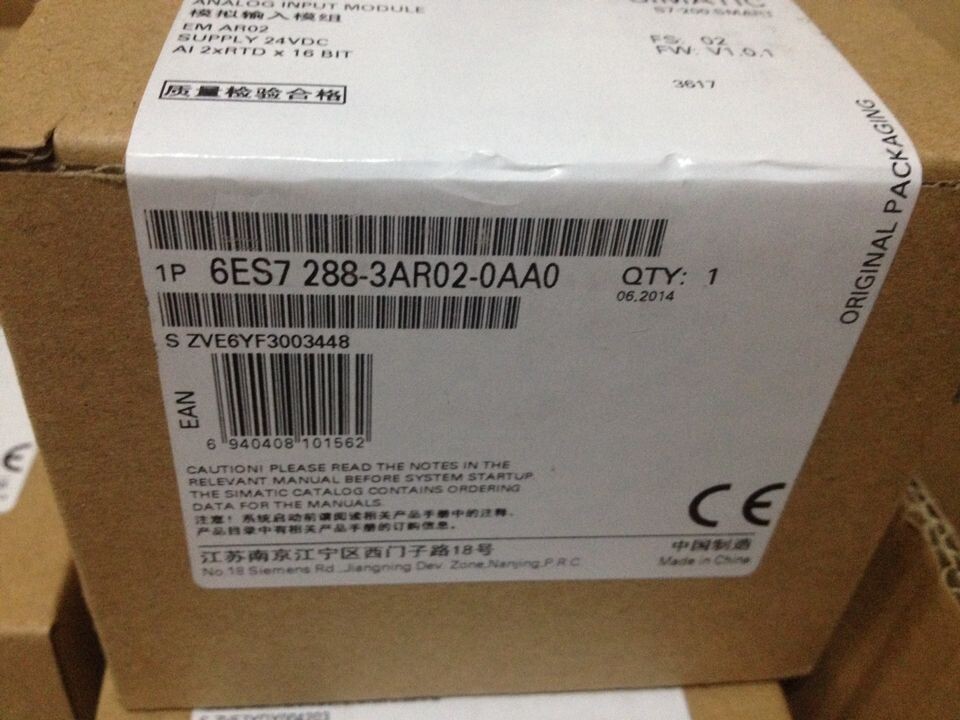
处理单元 CPU 订货号CPU SR20 标准型 CPU 模块,继电器输出,220 V AC 供电,12 输入/8 输出6ES7 288-1SR20-0AA0CPU ST20 标准型CPU模块,晶体管输出,24VDC供电,12输入/8输出6ES7 288-1ST20-0AA0CPU SR30 标准型CPU模块,继电器输出,220VAC供电,18输入/12输出6ES7 288-1SR30-0AA0CPU ST30 标准型CPU模块,晶体管输出,24VDC供电,18输入/12输出6ES7 288-1ST30-0AA0CPU SR40 标准型 CPU 模块,继电器输出,220 V AC 供电,24 输入/16 输出6ES7 288-1SR40-0AA0CPU ST40 标准型 CPU 模块,晶体管输出,24 V DC 供电,24 输入/16 输出6ES7 288-1ST40-0AA0CPU SR60 标准型 CPU 模块,继电器输出,220 V AC 供电,36 输入/24 输出6ES7 288-1SR60-0AA0CPU ST60 标准型 CPU 模块,晶体管输出,24 V DC 供电,36 输入/24 输出6ES7 288-1ST60-0AA0CPU CR40 经济型 CPU 模块,继电器输出,220 V AC 供电,24 输入/16 输出6ES7 288-1CR40-0AA0CPU CR60 经济型CPU模块,继电器输出,220VAC供电,36输入/24输出6ES7 288-1CR60-0AA0扩展模块 EM 订货号EM DI08 数字量输入模块,8 x 24 V DC 输入6ES7 288-2DE08-0AA0EM DR08 数字量输出模块,8 x 继电器输出6ES7 288-2DR08-0AA0EM DT08 数字量输出模块,8 x 24 V DC 输出6ES7 288-2DT08-0AA0EM DR16 数字量输入/输出模块,8 x 24 V DC 输入/8 x 继电器输出6ES7 288-2DR16-0AA0EM D 数字量输入/输出模块,16×24 V DC 输入/16 x 继电器输出6ES7 288-2D-0AA0EM DT16 数字量输入/输出模块,8 x 24 V DC 输入/8 x 24 V DC 输出6ES7 288-2DT16-0AA0EM DT32 数字量输入/输出模块,16 x 24 V DC 输入/16 x 24 V DC 输出6ES7 288-2DT32-0AA0EM AI04 模拟量输入模块,4 输入6ES7 288-3AE04-0AA0EM AQ02 模拟量输出模块,2 输出6ES7 288-3AQ02-0AA0EM AM06 模拟量输入/输出模块,4 输入/2 输出6ES7 288-3AM06-0AA0EM AR02 热电阻输入模块,2 通道6ES7 288-3AR02-0AA0EM AT04 热电偶输入模块,4通道6ES7 288-3AT04-0AA0信号板 SB 订货号SB CM01 通信信号板。
PLC的基本概念
可编程控制装置(Programmable Controller)是电脑家族中的一员,是为工业控制应用所设计制造的。早期的可编程控制装置称作可编程逻辑控制装置(Programmable Logic Controller),一般称作PLC,它通常作为代替继电器实现逻辑控制。随着技术的发展,这种装置的功能已经大大**过了逻辑控制的范围,所以,今天这种装置称作可编程控制装置,一般称作PC。但是为了杜绝与个人电脑(Personal Computer)的一般称作混淆,所以将可编程控制装置一般称作PLC
2、PLC的基本结构PLC实质是一种于工业控制的电脑,其硬件结构基本上与微型电脑相同,如图所示:
a. 处理单元(CPU)
处理单元(CPU)是PLC的控制**。它按照PLC系统程序赋予的功能接收并存储从编程器键入的客户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,可以诊断客户程序中的语法错误。当PLC投入运行时,首先它以扫描的方法接收现场各输入装置的状态和数据,并分别存入I/O映象区,然后从客户程序存储器中逐条读取客户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映象区或数据寄存器内。等全部的客户程序执行完成之后,后将I/O映象区的各输出状态或输出寄存器内的数据输送到相应的输出装置,如此循环运行,直到停止运行。
为了进一步提高PLC的可*性,近些年来对大型PLC还采用双CPU产生冗余系统,或采用三CPU的表决式系统。如此,即便某个CPU发生故障,整个系统依然能正常运行。b、存储器存放系统软件的存储器叫作系统程序存储器。
存放应用软件的存储器叫作客户程序存储器。
C、电源 PLC的电源在整个系统中起着十分重要得作用。如果没有一个优良的、可*得电源系统是无法工作正常的,所以PLC的生产商对电源的设计和制造也十分重视。一般交流电压波动在+10%(+15%)范围内,可以不采取其它措施而将PLC直接连接到交流电网上去。
3、PLC的工作方式
一. 扫描技术当PLC投入运行后,其工作流程一般分为三个阶段,即输入采样、客户程序执行和输出刷新三个阶段。完成以上三个阶段称作一个扫描周期。在整个运行期间,PLC的CPU以一定的扫描速度重复执行以上三个阶段。(一) 输入采样阶段
在输入采样阶段,PLC以扫描方法顺序地读入所有输入状态和数据,并将它们存入I/O映象区中的相应得单元内。输入采样结束后,转入客户程序执行和输出刷新阶段。在这两个阶段中,即便输入状态和数据发生改变,I/O映象区中的相应单元的状态和数据也不改。所以,如果输入是脉冲信号,则该脉冲信号的宽度必需**过一个扫描周期,才能保证在任何情况下,该输入均能被读入。
(二) 客户程序执行阶段在客户程序执行阶段,PLC总是按由上而下的顺序顺序地扫描客户程序(梯形图)。在扫描每一条梯形图时,又总是先扫描梯形图左边的由各触点产生的控制线路,并按先左后右、先上后下的顺序对由触点产生的控制线路进行逻辑运算,然后按照逻辑运算的结果,刷新该逻辑线圈在系统RAM存储区中对应位的状态;或者刷新该输出线圈在I/O映象区中对应位的状态;或者确定是不是要执行该梯形图所规定的功能指令。即,在客户程序执行流程中,仅有输入点在I/O映象区内的状态和数据不会发生改变,而其他输出点和软设备在I/O映象区或系统RAM存储区内的状态和数据都有可能发生改变,并且排在上面的梯形图,其程序执行结果会对排在下面的凡是用到这些线圈或数据的梯形图起作用;相反,排在下面的梯形图,其被刷新的逻辑线圈的状态或数据只能到下一个扫描周期才能对排在其上面的程序起作用。
(三) 输出刷新阶段
当扫描客户程序结束后,PLC就进入输出刷新阶段。在此期间,CPU按照I/O映象区内对应的状态和数据刷新全部的输出锁存电路,再经输出电路推动相应的外设。这时,才是PLC的真正输出。
比较下二个程序的异同:
这两段程序执行的结果完全一样,但在PLC中执行的流程却不同。
※ 程序1只用一次扫描周期,就可完成对%M4的刷新;
※ 程序2要用四次扫描周期,才能完成对%M4的刷新。
这两个例子说明:相同的若干条梯形图,其排列次序不同,执行的结果也不一样。另外,也可看到:采用扫描客户程序的运行结果与继电器控制装置的硬逻辑并行运行的结果有所区分。当然,如果扫描周期所占用的时间对整个运行来讲可以忽略,那么二者之间就没有什么区分了。
通常情况下,PLC的扫描周期包括自诊断、通讯等,如下图所示,即一个扫描周期相当于自诊断、通讯、输入采样、客户程序执行、输出刷新等所有时间的总和。

客户程序执行阶段在客户程序执行阶段,PLC总是按由上而下的顺序顺序地扫描客户程序(梯形图)。在扫描每一条梯形图时,又总是先扫描梯形图左边的由各触点产生的控制线路,并按先左后右、先上后下的顺序对由触点产生的控制线路进行逻辑运算,然后按照逻辑运算的结果,刷新该逻辑线圈在系统RAM存储区中对应位的状态;或者刷新该输出线圈在I/O映象区中对应位的状态;或者确定是不是要执行该梯形图所规定的功能指令。即,在客户程序执行流程中,仅有输入点在I/O映象区内的状态和数据不会发生改变,而其他输出点和软设备在I/O映象区或系统RAM存储区内的状态和数据都有可能发生改变,并且排在上面的梯形图,其程序执行结果会对排在下面的凡是用到这些线圈或数据的梯形图起作用;相反,排在下面的梯形图,其被刷新的逻辑线圈的状态或数据只能到下一个扫描周期才能对排在其上面的程序起作用。
(三) 输出刷新阶段
当扫描客户程序结束后,PLC就进入输出刷新阶段。在此期间,CPU按照I/O映象区内对应的状态和数据刷新全部的输出锁存电路,再经输出电路推动相应的外设。这时,才是PLC的真正输出。
比较下二个程序的异同:
这两段程序执行的结果完全一样,但在PLC中执行的流程却不同。
※ 程序1只用一次扫描周期,就可完成对%M4的刷新;
※ 程序2要用四次扫描周期,才能完成对%M4的刷新。
这两个例子说明:相同的若干条梯形图,其排列次序不同,执行的结果也不一样。另外,也可看到:采用扫描客户程序的运行结果与继电器控制装置的硬逻辑并行运行的结果有所区分。当然,如果扫描周期所占用的时间对整个运行来讲可以忽略,那么二者之间就没有什么区分了。
通常情况下,PLC的扫描周期包括自诊断、通讯等,如下图所示,即一个扫描周期相当于自诊断、通讯、输入采样、客户程序执行、输出刷新等所有时间的总和。
二. PLC的I/O响应时间
为了提高PLC的抗干扰能力,提高其可*性,PLC的每个开关量输入端都采用光电隔离等技术。
为了可实现继电器控制线路的硬逻辑并行控制,PLC使用了不同于一般微型电脑的运行方法(扫描技术)。
以上两个主要原因,导致PLC得I/O响应比一般微型电脑产生的工业控制系统满的多,其响应时间少相当于一个扫描周期,一般均**一个扫描周期甚至更长。
所谓I/O响应时间指从PLC的某一输入信号变化开始到系统相关输出端信号的改变所需的时间。其短的I/O响应时间与长的I/O响应时间如图所示
SIEMENS PLC在的产品,按照规模和性能的大小,主要包括 S7-200 S7-300 和S7-400三种,下面就简单简介一下该三种产品的一些特性。
针对低性能需求的摸块化小控制系统,它多可有7个模块的扩展能力,在模块中集成背板总线,它的网络连接有RS-485通讯接口和Profibus两类,可通过编程器PG访问所有模块,带有电源、CPU和I/O的一体化单元设备。
其中的扩展模块(EM)有以下类别:数字量输入模块(DI)——24VDC 和 120/230VAC;数字量输出(DO)——24VDC 和 继电器;模拟量输入模块(AI)——电压、电流、电阻和热电偶;模拟量输出模块——电压和电流。 还有一个比较的模块-通讯处理器(CP)——该块的功能是可以把S7-200作为主站连接到AS-接口(传感器和执行器接口),经过AS-接口的从站可以控制多达248个设备,如此就能显著的扩展S7-200的输入和输出点数。
功能
在标准化环境中,通过编程器/PC 的串行接口并使用西门子的 USS 协议对西门子变频器进行调试、参数设置和诊断
可在 Windows 操作系统 Windows 2000/XP/7 和 Windows 2003/2008 Server 中运行
使用 RS-232/RS-485 协议并通过编程器/PC 的串行 COM 接口以及 OPC,在编程器/PC 与变频器之间进行数据传输
可以在线(与变频器连接)和离线(不与变频器连接,例如,在办公环境中)进行参数设置
管理参数组(上传、下载、比较、打印)
在屏幕提示下,对 MASTERDRIVES VC 和 MC 设备以及 SIMOREGDC-Master 进行图形化调试
可方便地读出内部状态变量(使用跟踪功能进行记录)并以数字式存储示波器上的显示方式进行显示
可为 MASTERDRIVES 系列的选件卡(如 PROFIBUS 板 CBP2)下载固件
MASTERDRIVESMC 的图形化在线诊断画面用于组态速度控制器、位置控制器、基本定位 (EPOS) 和同步操作

运动控制
三轴 100 kHz 高速脉冲输出,实现定位.
运动控制基本功能
标准型晶体管输出CPU 模块,ST40/ST60 提供3 轴100 kHz 高速脉冲输出,支持PWM(脉宽调制)和PTO 脉冲输出
在PWM 方式中,输出脉冲的周期是固定的,脉冲的宽度或占空比由程序来调节,可以调节电机速度、阀门开度等
在PTO 方式(运动控制)中,输出脉冲可以组态为多种工作模式,包括自动寻找原点,可实现对步进电机或伺服电机的控制,达到调速和定位的目的
CPU 本体上的Q0.0,Q0.1 和Q0.3 可组态为PWM 输出或高速脉冲输出,均可通过向导设置完成上述功能
PWM 和运动控制向导设置
为了简化您应用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向导可以帮助您在几分钟内全部完成PWM、PTO 的组态。该向导可以生成位控指令,您可以用这些指令在您的应用程序中对速度和位置进行动态控制。
PWM 向导设置根据用户选择的PWM 脉冲个数, 生成相应的PWMx_RUN 子程序框架用于编辑。
运动控制向导多提供3 轴脉冲输出的设置,脉冲输出速度从20 Hz 到100 kHz 可调。
运动控制功能特点
提供可组态的测量系统,输入数据时既可以使用工程单位(如英寸或厘米),也可以使用脉冲数
提供可组态的反冲补偿
支持、相对和手动位控模式
支持连续操作
提供多达32 组运动动包络,每组包络多可设置16 种速度
提供4 种不同的参考点寻找模式,每种模式都可对起始的寻找方向和终的接近方向进行选择
运动控制的
为了帮助用户开发运动控制方案,STEP 7- Micro/WIN SMART 提供运动控制面板。其中的操作、组态和包络组态的设置使用户在开发过程的启动和测试阶段就能轻松运动控制功能的操作。
使用运动控制面板可以验证运动控制功能接线是否正确,可以调整组态数据并测试每个移动包络
显示位控操作的当前速度、当前位置和当前方向,以及输入和输出LED(脉冲LED 除外)的状态
查看修改在CPU 模块中存储的位控操作的组态设置
编程
人性化软件,提升编程效率
STEP 7- Micro/WIN SMART 是为S7-200 SMART 开发的编程软件,能在Windows XP SP3/Windows 7 上运行,支持LAD、FBD、STL语言。安装文件小于100 MB。在沿用STEP 7- Micro/WIN 编程理念的同时,更多的人性化设计使编程更容易上手,项目开发更加。
全新菜单设计
摒弃了传统的下拉式菜单,采用了新颖的带状式菜单设计,所有菜单选项一览无余,形象的图标显示,操作更加方便快捷。
双击菜单即可隐藏,给编程窗口提供更多的可视空间。
全移动式窗口设计
软件界面中的所有窗口均可随意移动、并提供八种拖拽放置方式。
主窗口、程序编辑窗口、输出窗口、变量表、状态图等窗口均可按照用户的习惯进行组合,限度的提高编程效率。
变量定义与程序注释
用户可根据工艺需求自定义变量名,并且直接通过变量名进行调用,完全享受编程语言的便利。根据实现的功能,功能寄存器调用后自动命名,更加便捷。
STEP 7- Micro/WIN SMART 提供了完善的注释功能,能为程序块、编程网络、变量添加注释,大幅提高程序的可读性。当鼠标移动到指令块时,自动显示各管脚支持的数据类型。
强大的密码保护
STEP 7- Micro/WIN SMART 不仅对计算机中的程序源提供密码保护,同时对CPU 模块中的程序也提供密码保护,满足用户对密码保护的不同需求,保护用户的知识产权。
STEP 7- Micro/WIN SMART 对程序源实现三重保护:包括为为工程、POU(程序组织单元)、数据页设置密码,只有授权的用户才能查看并修改相应的内容。
编程软件对 CPU 模块里的程序提供4 级不同权限密码保护。
新颖的设置向导
STEP 7- Micro/WIN SMART 集成了简易快捷的向导设置功能,只需按照向导提示设置每一步的参数即可完成复杂功能的设定。新的向导功能允许用户直接对其中某一步的功能进行设置,修改已设置的向导便*重新设置每一步。
向导设置支持以下功能:
• HSC(高速计数)
• 运动控制
• PID
• PWM(脉宽调制)
• 文本显示
状态
在STEP 7- Micro/WIN SMART 状态图中,可监测PLC 每一路输入/ 输出通道的当前值,同时可对每路通道进行强制输入操作来检验程序逻辑的正确性。
状态监测值既能通过数值形式,也能通过比较直观的波形图来显示,二者可相互切换。
另外,对PID 和运动控制操作,STEP 7- Micro/WIN SMART 通过的操作面板可对设备运行状态进行。
在不同的通信方式中都要对ModbusPDU进行封装,组成不同的Modbus帧,这种帧在Modbus协议中有的名词称之为应用数据单元(ADU)。在Modbus-RTU和Modbus-Plus通信中采用的是标准应用数据单元,它只是在PDU前面加上了占用一个字节的附加地址和在PDU结束增加了占用两个字节的校验码。在Modbus-TCP/IP网络通信中需要对Modbus应用层协议进行重新封装,该封装是通过在ModbusPDU前加上了Modbus应用层协议帧头来实现。
基于串行链路的Modbus通信网络是一种主从式网络,在串行网络中只允许存在一个主节点和多247个从节点,在这种网络下,标准ModbusADU中的附加地址域只包含从节点的地址,可寻址范围是0~247,地址0作为广播模式地址使用,从节点地址的有效取值范围是1~247,并且每个从节点的地址必须是的,主节点不存在具体的地址值。主节点设备将要访问的从节点设备的地址放入到请求帧的地址域中,当该地址的从节点设备作出响应时,将会把从节点设备的地址复制到响应帧的地址域中,主节点设备通过该地址得知是由哪个从节点设备发来的响应。
产工作原理由一个中心有轴的光电码盘,其上有环形通、暗的刻线,
编码器(有光电发射和件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
6主要作用它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,
编码器这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
编码器产生电信号后由数控制置CNC、可编程逻辑控制器PLC、控制系统等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈系统以及测量和控制设备。在ELTRA编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外光源垂直照射,这样光就把盘子上的图像投射到表面上,该覆盖着一层光栅,称为准直仪,它具有和光盘相同的窗口。的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,旋转编码器也能得到一个速度信号,这个信号要反馈给变频器,从而调节变频器的输出数据。故障现象:1、旋转编码器坏(无输出)时,变频器不能正常工作,变得运行速度很慢,而且一会儿变频器保护,显示“PG断开”...联合动作才能起作用。要使电信号上升到较高电平,并产生没有任何干扰的方波脉冲,这就必须用电子电路来处理。编码器pg接线与参数矢量变频器与编码器pg之间的连接方式,必须与编码器pg的型号相对应。一般而言,编码器pg型号分差动输出、集电开路输出和推挽输出三种,其信号的传递方式必须考虑到变频器pg卡的接口,因此选择合适的pg卡型号或者设置合理.
编码器一般分为增量型与型,它们存着大的区别:在增量编码器的情况下,
编码器位置是从零位标记开始计算的脉冲数量确定的,而型编码器的位置是由输出代码的读数确定的。在一圈里,每个位置的输出代码的读数是*的; 因此,当电源断开时,型编码器并不与实际的位置分离。如果电源再次接通,那么位置读数仍是当前的,有效的; 不像增量编码器那样,必须去寻找零位标记。
编码器的厂家生产的系列都很全,一般都是的,如电梯型编码器、机床编码器、伺服电机型编码器等,并且编码器都是智能型的,有各种并行接口可以与其它设备通讯。
编码器是把角位移或直线位移转换成电信号的一种装置。前者成为码盘,后者称码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是“1”还是“0”;非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是“1”还是“0”。
按照工作原理编码器可分为增量式和式两类。
编码器增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。
编码器由机械位置决定的每个位置的*性,它*记忆,*找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。
由于编码器在定位方面明显地优于增量式编码器,
http://zhangqueena.b2b168.com