- 浔之漫智控技术(上海)有限公司
- 服务热线:
15221406036




产品描述
6ES7222-1EF22-0XA0供应现货
:机械手是众制系统的主要操作执行机构,其控制性能的好坏决定了控制系统的较终精度、稳定性等。采用PLC对气动机械手进行控制,同时由上位机对机械手的运行状态进行监控。系统调试结果证明基于MCGS组态软件气动机械手PLC控制系统具有良好的稳定性和操控性。
1引言
机械手能模人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,被广泛应用于机械制造、冶金、电子、轻工等工业。气动机械手是以压缩空气的压力来驱动执行机构运动的机械手。气动动作迅速,结构简单,。气动系统也能实现过载保护,便于自动控制。气源来自于压缩空气,可以存储于储气罐中,因此,发生突然断电的情况时,机器及工艺流程不致突然中断。PLC具有较强的稳定性,被广泛应用于工业控制中,采用PLC实现气动机械手控制是一种可靠、稳定、方便的控制方案。针对目前存在的机械手控制中对机械手运行状态难于监控的问题,采用组态软件对机械手的运行位置进行监控,同时也可实现机械手的远程控制。
2机械手动作流程
在工厂中,机械手要做顺序系列的动作。现在以一串动作为例,比如工件在某一高度的A位置。
机械手动作顺序:原位→右行→上升→夹紧→下降→左行→上升→放松。
机械手的控制方式分为:手动和自动。在手动运行方式下机械手分为单步动作;在自动运行方式下,机械手的动作分为单周期和循环。
手动单步运行时,用各自的按钮控制各个负载单独接通或断开的方式。按下按钮则机械手开始一个动作,松开按钮则机械手停止动作。
单周期工作方式时,按下启动开关,机械手从原点开始右行,右行到右限位开关时,机械手开始上升,上升到上限位开关时,机械手开始夹紧,夹紧到夹紧限位时,机械手开始下降,下降到下限位开关时,机械手开始左行,左行到左限位开关时,机械手开始放松,放松到放松限位开关时,回到原点。
循环工作方式时,在原点位置按启动按钮,开始连续的反复运行。若途中按停止按钮,动作将继续执行当机械手运行到到原点才机械手停在原位。
3控制系统的硬件设计
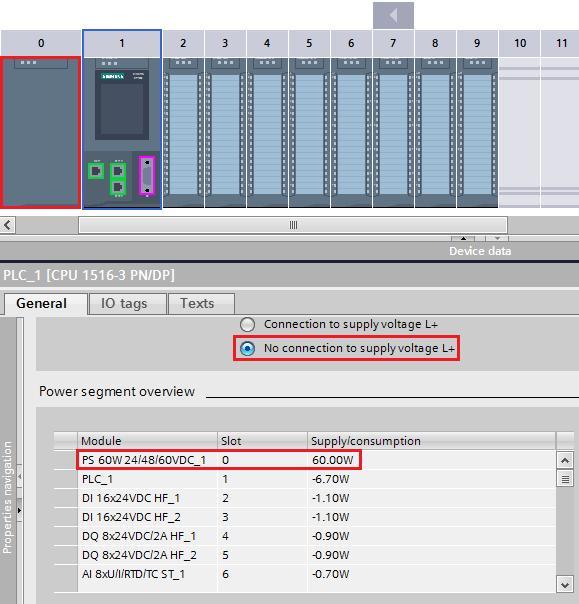
(1)PLC选择
可编程控制器(PLC)由于其具有高的可靠性,编程方便,便于使用和修改,易于扩展和维护,环境要求低,体积小,安装测试方便等性能在工业控制中有着广泛的应用。
本系统的输入量为8,输出量为3个,加上一定量的冗余,选择西门子公司所生产的CPU224来控制机械手的运行。它以紧凑的结构、良好的延展性、强大的指令功能、低廉的价格,是小型控制工程的理想控制器。S7-200 PLC包含了一个单独的S7-200 CPU和各种可选择的扩展模块,可以十分方便地组成不同规模的控制器。S7-200的编程软件STEP7-Micro/WIN可以方便地在bbbbbbs环境下对PLC编程、调试、监控,使得PLC的编程更加方便、快捷。在我们的设计中选用的是CPU224,CPU224集成了14点输入/10点输出,共有24个数字量I/O,符合系统的控制要求。
(2)执行元件选择
实现机械手动过的汽缸由电磁阀来实现,阀门的位置决定汽缸的运动方向。电磁阀是用来控制流体的自动化基础元件,属于执行器件,电磁阀用于控制液压、气体等流动方向,电磁阀的工作原理:电磁阀里有密闭的腔,在的不同位置开有通孔,每个孔都通向不同的油管,腔中间是阀,两面是两块电磁铁,哪面的磁铁线圈通电阀体就会被吸引到哪边,通过控制阀体的移动来档住或漏出不同的排油的孔,而进油孔是常开的,液压油就会进入不同的排油管,然后通过油的压力来推动油刚的活塞,活塞又带动活塞杆,活塞竿带动机械装置动。这样通过控制电磁铁的电流就控制了机械运动。本系统采用的是两位三通的电磁阀。
4系统的I/O分配
系统的输入量为启动、停止、及PLC个限位开关,输出要控制电磁阀实现机械手的动作,为此机械手的I/O分配如表1所示。
输入信号 | 输出信号 | ||||
电路器件 | 编程地址 | 说明 | 电路器件 | 编程地址 | 说明 |
SB1 | I0.0 | 启动按钮 | KA1 | Q0.0 | 左/右继电器 |
SB2 | I0.1 | 停止按钮 | KA2 | Q0.1 | 上/下继电器 |
SQ1 | I0.2 | 右行限位 | KA3 | Q0.2 | 夹/放继电器 |
5PLC系统程序
系统程序分为手动和自动程序,自动程序分为单周期、循环。软件采用主程序、子程序结构。机械手控制系统主程序由手动控制子程序、自动控制单周期子程序、自动控制连续控制子程序组成。
手动/自动程序切换由上位机软元件控制,用PLC辅助继电器实现。手动程序中的单步动作由单步按钮实现,系统采用PLC辅助继电器实现。
单周期和连续控制开关都由PLC辅助继电器完成,辅助继电器与上位机中的组态软件的软元件通信实现。
手动操作子程序中通过操作方式开关拨到手动方式,进入手动操作控制子程序,通过6个按钮,即右行、上升、夹紧、下降、左行、上升、放松,来完成对机械手的手动操作控制。
6监控画面设计
组态软件是数据与过程控制的**软件,它们是在自动控制系统监控层一级的软件平台和开发环境,能以灵活多样的组态方式(而不是编程方式)提供良好的用户开发界面,其预设置的各种软件模块可以非常容易地实现和完成监控层的各项功能,并能同时支持各种硬件厂家的计算机和I/O产品,与工控计算机和网络系统结合,可向控制层和管理层提供软件硬件的全部接口,进行系统集成。
在进行分析工程项目的系统构成、技术要求和工艺流程时,弄清系统的控制流程和监控对象的特征,明确监控要求和动画显示方式,分析工程中的设备采集及输出通道与软件中实时数据库变量的对应关系,分清哪些变量是要求与设备连接的,哪些设备是软件内部用来传递数据及动画显示的。
动画制作分为静态图形设计和动态属性设置两个过程。**部分类似于“画画”,用户通过MCGS组态软件中提供的基本图形元素及动画构件库,在用户窗口内“组合”成各种复杂的画面。后一部分则设置图形的动画属性,与实时数据库中定义的变量建立相关性的链接关系,作为动画图形的驱动源。
在运行策略窗口内,从策略箱中,选择所需功能策略构件,构成各种功能模块(称为策略块),由这些模块实现各种人机交互操作。MCGS还为用户提供了编程用的功能构件,称之为(脚本程序)功能构件,使用简单的编程语言,编写工程控制程序。本系统的脚本程序如下:
IF Q0=1 THEN
左右移动=1
ENDIF
IF IO2=1 AND Q1=1 THEN
升降=1
ENDIF
IF IO3=1 AND Q2=1 THEN
加紧放松=1
ENDIF
IF IO4=1 AND Q1=0 THEN
升降=0
ENDIF
IF IO4=1 AND Q1=0 THEN
工件垂直=1
ENDIF
IF Q0=0 THEN
左右移动=0
ENDIF
IF Q0=0 THEN
工件水平移动=1
ENDIF
IF Q2=0 THEN
加紧放松=0
ENDIF
IF Q2=0 THEN
工件垂直=0
ENDIF
IF Q2=0 THEN
工件水平移动=0
ENDIF
7结束语
采用MCGS组态软件设计的气动PLC控制系统,由PLC进行逻辑控制,由气缸进行驱动,通过PLC控制,经过右行,上行,抓取,下行,左行,放松等动作顺序实现自动的工件抓放。由工频电网供电,根据PLC程序进行手自动切换,用MCGS组态软件进行监控,对比机械手的动作与监控画面的动作是否一致,可以是生产系统减少很多劳动力。进一步提高了生产效率。

本文从硬件和软件两个方面介绍了PLC(可编程序控制器)在扭转试验机电控制系统改造中的应用。
扭转试验机机转速自动控制系统采用的是转速负反馈和电流截止负反馈晶闸管双闭环直流转速自动系统。由主电路、触发、放大、励磁、测速和换向回路等部分组成。
新系统使用PLC对该系统的控制部分进行改造,系统的可靠性大大提高,且控制线路得以简化,对类似系统的改造具有一定参考价值。
1. PLC在扭转试验机
系统设计原理
为保留原系统的技术性能,直流电动机乃采用Z2系统,功率为1.1KW,电压为110V,电流为13.45A,励磁电压为110V,励磁电流为0.713A,转速为1500rpm
PLC采用实验室现有的SR—21型,其存储器容量为700字(CMOS)、扫描速度12ms(1.0K),数模转换时间为2ms,具有较强的逻辑和数值运算功能,框架为E—50B型。
触发脉冲生成器的作用是将PLC运算后的输出量转换成晶闸管的触发双脉冲,经隔离后驱动晶闸管电路,将交流电整流成直流电。
励磁电路中包括弱磁信号的电路,该电路既将PLC运算后的输出量转换成所需的励磁直流量,又可进行弱磁保护。
PLC共需使用4个A/D输入模块,故应占用四个输入通道,四个通道分配为:转速给定值、转速测量值、电机电流测量值、电机电压测量值。使用两个D/A输出模块,占用两个输出通道分别设置为电枢电压调节量和励磁电流调节量。
为满足系统对调速的要求,控制环节采用带PI调节器和给定积分等辅助环节的方式进行控制。设U为调节器的输出,△V为转速测量值与转速给定值的差,t为PI调节器积分部分的时间常数。则
U=KP(△V+1/t)………….…………………(1)
其中,KP是比例系数。
设tC为为采样周期,UN为第N 次采样输出,△VN为第N次采样偏差。则积分式变为
UN=KP(△VN +tC/t)………………………………(2)
为便于PLC运算,将式(2)变为增量形式
△U=KP(△VN—△VN-1)+KP‘ △VN …….………………(3)
其中:KP‘=KPtC/t 2. PLC在扭转试验机
控制系统的软件设计
该软件应用能完成式(3)的计算。式中有两个变量,即速度给定值Ug和反馈环节的测量值Uf。在程
序中它们分别存入R400和R402。R415设为输出值寄存器,R435设为中间运算寄存器。取常数
C1=1/KP、C2=1/KP,调节运算周期为K×0.1S。图二给出程序主体部分的流程图。程序中,先将R400与R402的数据进行比较,结果存入772、773和774。为满足调速性能的要求,用计数器C600设定速度调节周期为K×0.1S,即每隔K×0.1S进行一次调节运算。根据测量数据R402与给定数据R400之差,判断是否进行△VN的增加运算或减少运算。增加运算时与“225”比较,“225”为增加运算的溢出范围 。
减少运算时与“0”比较,“0”为较小运算调节量。如输出值小于“0”,则以“0”输出,如不小于“0”,以正常值输出,即作上下限处理。
3.结论:扭转试验机的电气控制系统采用PLC进行改造,系统的可靠性得以提高,工作更加稳定,实时性强,计算精确度高。但系统中的触发脉冲生成器须进行一定的修改,应使其输入端与PLC的D/A输出模块输出量相匹配,以便将该输出量转变成能控制晶闸管整流电路的脉冲信号。SR—21还具有较强的逻辑控制功能,扭转试验机的启动、停止、可逆运行、测力机构、显示机构等均可由PLC参与控制。限于篇幅,本文从略。
产品推荐

















