-

浔之漫智控技术(上海)有限公司
主营:西门子DP电缆代理商

浔之漫智控技术(上海)有限公司
主营:西门子DP电缆代理商 7
7

西门子触摸屏6AV2123-2DB03-0AX0技术参数
S7中定时时间由时基和定时值两部分组成,定时时间等于时基与定时值的乘积。当定时器运行时,定时值不断减1,直至减到0,减到0表示定时时间到。定时时间到后会引起定时器触点的动作。
定时器的0到11位存放BCD码格式的定时值,三位BCD码表示的范围是0~999。12,13位存放二进制格式的时基。
从下表中可以看出:时基小定时分辨率高,但定时时间范围窄;时基大分辨率低,但定时范围宽。
时 基 二进制时基 分辨率 定 时 范 围
10 s 00 0.01 s 10ms至9s_990ms
100ms 0l 0.1 s 100ms至1m_39s_900ms
1 s 10 1s 1s至16m_39s
10 s 11 10 s 10s至2h_46m_30s
当定时器启动时,累加器1低字的内容被当作定时时间装入定时字中。这一过程是由操作系统控制自动完成的,用户只需给累加器l装入不同的数值,即可设置需要的定时时间。
采用下述直观的句法:
L W#16# txyz
其中:t,x,y,z均为十进制数;
t=时基,取值0,1,2,3,分别表示时基为:10ms、100ms、1s、10s。
xyz=定时值,取值范围:1到999。
也可直接使用S5中的时间表示法装入定时数值,例如:
L S5T# aH_bbM_ccS_dddMS
其中:a=小时,bb=分钟,cc=秒,ddd=毫秒.
范围:1MS到2H_46M_30S;此时,时基是自动选择的,原则是:根据定时时间选择能满足定时范围要求的小时基。
S7—300提供了多种形式的定时器:脉冲定时器(SP)、扩展定时器(SE)、接通延时定时器(SD)、带保持的接通延时定时器(SS)和断电延时定时器(SF)。
1 引 言
现代控制系统中的模糊控制能方便地解决工业领域中常见的非线性、时变、大滞后、强耦合、变结构、结束条件苛刻等复杂问题。可编程控制器以其高性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的、、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。该文研究了通用模糊控制器在PLC上实现的几种算法,用离线计算、在线查表插值的方法实现模糊控制。
为了满足不同执行机构对控制量形式的要求,采用增量式/ 位置式模糊控制输出的算法,在增量式模糊控制输出时,可实现手动与自动之间的无扰动切换。为了由于频繁动作引起的振荡,采用了带死区的模糊控制算法。此外,一般的在线查表模糊控制器中存在着模糊量化取整环节,即当误差E与误差变化率EC 不等于模糊语言值(例如NB ,NM,NS ,ZO ,PS ,PM或PB) 时, E 和EC 取整,这时从查询表中查到的控制量U 只能近似地反映模糊控制规则,因此产生误差。由于量化误差的存在,不仅使模糊控制器的输出U 不能准确地反映其控制规则,而且会造成调节死区,在稳态阶段,使系统产生稳态误差,甚至会产生颤振现象。文中提出的二元三点插值法可从根本上量化误差和调节死区, 克服由于量化误差而引起的稳态误差和稳态颤振现象。图1 —1 给出了通用模糊控制器的基本组成结构。
2 通用模糊控制器在PLC 上的设计实现
2.1 离线部分设计
离线部分的算法设计主要包括以下内容:选择模糊输入、输出变量的论域范围及模糊变集类型;确定各模糊变量的隶属函数类型;输入、输出变量的模糊化;模糊控制规则;确定模糊推理算法;模糊输出变量的去模糊化;按所需的格式保存计算结果生成查询表。
实际应用中广泛采用的二维模糊控制器多选用受控变量和输入给定的偏差E 和偏差变化率EC 作为输入变量,因为它已能够比较严格的反映受控过程中输入变量的动态特性,可满足大部分工程需要,同时也比三维模糊控制器计算简单, 模糊控制规则容易理解。对于多变量模糊控制器可利用模糊控制器本身的解耦特点,通过模糊关系方程分解,在控制器结构上实现解耦, 即将一个多输入多输出(MI —MO) 的模糊控制器,分解成若干个多输入单输出(MI —SO) 的模糊控制器,这样就可采用单变量模糊控制器的设计方法。该文研究了二维通用模糊控制器的设计。为了便于由用户在线控制时决定是增量式输出还是位置式输出,输出变量取调节量的变化U ,这也有利于通过对调节量变化U 的调整, 使系统偏差减少。
由于模糊控制器的控制品质受控制器输出方式的影响,对不同的受控对象提供位置式输出和增量式输出这两种选择方式。位置式输出算法的缺点是输出的u (k) 对应的是执行机构的实际位置,如果计算机出现故障,会引起由于u (k) 的大幅度变化而导致执行机构位置的大幅度变化。如果采用增量式算法时,计算机输出的是控制增量Δu (k) 对应的本次执行机构位置(例如阀门开度) 的增量,为增量式输出模糊控制系统框图, 阀门实际位置的控制量即控制量增量的积累
模糊控制算法的实现是通过模糊推理所得, 但该结果是一个模糊矢量, 不能直接用于控制被控对象,转换为一个执行机构可以接受的量。将所有可能输入状态的非模糊输出以同样方法计算后数据模块形式存入计算机程序中,当一组输入给定时,可由该表查出相应的输出值。该方法将复杂的模糊计算融进查询表中,在实际使用时节省计算时间,并使控制变得简单明了。
2.2 在线部分设计
计算机离线运算得到的模糊控制器的总控制表经过系统在线反复调试、修改,后以数据模块形式存入PLC 系统内存中,由一个查询该表的子程序管理。查询子程序的流程如图2 —2 所示,图中fielde 、fieldec 及fieldu 分别表示误差E、误差变化率EC 和控制量U 的论域范围。由流程图可知,控制器的调节方式有手动和自动两种, 输出方式有增量式和位置式输出两种。如果输出方式选择为增量式输出,则可以实现手动调节方式到自动调节方式的无冲击切换。
2.2.1 二元三点插值
给定矩型域上n×m 个结点(xi , yj) 的函数值zij = (xi , yj) ,其中i = 0 ,1 , ⋯, n - 1; j = 0 ,1 , ⋯, m -1 ,在两个方向上的坐标分别为x0 < x1 < ⋯< xn - 1 ,y0 < y1 < ⋯< ym - 1 ,利用二元三点插值公式可计算出插值(u , v) 处的函数近似值w = z( u , v) 。表2 —1 用函数形式表示为Uij = f(Ei , ECj) , 其中i =1 ,2 , ⋯, k1 ; j = 1 ,2 , ⋯, k2 。设某个采样周期的输入为E、EC ,则需求出U = f(E , EC) 的值。
采用二元三点插值法运算相当于E与EC 在其论域内的分档数趋于无穷大, 这样不仅能够满足表2—1 所给出的查询表的控制规则,而且还在控制规则表内的相邻分档之间以线性插值方式了无穷多个新的、经过细分的控制规则, 加充实完善了原来的控制规则,并从根本上了量化误差和调节死区, 克服了由于量化误差而引起的稳态误差和稳态颤振现象,了系统的性能,尤其是稳态性能。
2.2.2 带死区的模糊控制算法
为了避免控制动作过于频繁,由于频繁动作引起的震荡,带死区的控制算法是一个好的解决办法。
上式中,死区e0 是一个可调节的参数, 其具体数值可根据实际控制对象由实验确定。若e0 值太小,使控制动作过于频繁,达不到稳定被控对象的目的;若e0 值太大,则系统将产生较大的滞后。
带死区的模糊控制器的系统结构如图2 —3 所示,此控制系统实际上是一个非线性系统。即当|e( k) | ≤|e0| 时,模糊控制器输出为零;当|e(k) | >|e0| 时,模糊控制器有适当的输出。
3 应用实例
模糊控制器的输入变量为实际转速与转速给定值之间的差值e 及其变化率ec , 输出变量为电机的电压变化量u 。 电机调试输出, 其横坐标为时间轴, 纵坐标为转速。当设定转速为2 000r/ s 时,电机能很快稳定运行于2 000r/ s ;当设定转速下降到1 000r/ s时,转速又很快下降到1 000r/ s 稳定运行。
4 小 结
通用模糊控制器在PLC 上的实现采用了二维模糊控制结构,这种结构能确保系统的简单性和快速性。它的输入为系统误差E和误差变化率EC ,因此它具有类似于常规PD 控制器的功能和良好的动态特性。在实际应用中实,系统响应速度快,调量很小,稳态精度高。为了获得好的静态性能,应加入模糊积分单元,构成PID 模糊控制器。
摘要: 扎啤一直是深受消费者喜爱的一种饮品,其消费在均有增长的趋势,在此形势下,现行扎啤桶清洗设备清洗效率低的缺点必将日益凸显。在对现行扎啤桶清洗设备和清洗方法充分分析的基础上进行了研究,提出了一种基于北京腾控科技有限公司T910系列PLC的并联清洗方法,重新设计了扎啤桶清洗机的结构,其清洗效率将提高3-4倍,可以有效缓解上述状况。
关键词:效率;并联清洗方法; 腾控PLC
1 引言
扎啤是没有经过发酵的啤酒,是一种、无色素、无防腐剂、不加糖、不加任何香精的饮品,营养高 。扎啤桶清洗设备是随着扎啤的普及而研制开发的。随着人们生活水平的不断提高,对扎啤的消费量也逐年猛增,扎啤桶的清洗问题也随之显露,虽然市场上现行的扎啤桶清洗设备已经采用了PLC控制,实现了半自动化作业,但随着扎啤消费的进一步增大,扎啤桶的清洗效率低的问题也必将渐渐凸显。本文提出了一种基于北京腾控科技有限公司T910系列PLC的并联清洗方法,重新设计了扎啤桶清洗机的结构,使得清洗效率有了很大的提高,有效克服了清洗效率低的问题。
2 现行清洗设备分析
2.1现行清洗设备结构特征
典型的清洗设备如青岛华英啤酒设备有限公司生产的各种型号的清洗机,其清洗头都是固定在清洗设备的工作台上。当扎啤桶安放在清洗头上后,靠安装在机架上方的气压缸下压扎啤桶,使清洗头将桶盖开,然后进行相关作业。
2.2现行清洗设备的清洗原理
虽然现行清洗设备的生产厂家和产品型号均有所不同,但是其清洗过程都是相似的,
尽管现行扎啤桶清洗设备的通用性较强,能够清洗各种型号的扎啤桶,但是其清洗能力只有100-120桶每小时 ,还需要至少两名工人协作完成,随着扎啤消费量的增大,这样的清洗效率是比较低的。
3 并联式扎啤桶清洗设备设计
3.1 并联式扎啤桶清洗设备的设计原理
如果将这种现行的清洗方法定义为串联清洗方法,所谓的串联清洗方法是指清洗动作顺次进行,即当扎啤桶安装后按照图1清洗工艺顺序进行,然后停机卸桶。这里所提出并采用的是并联清洗方法。所谓的并联清洗方法,清洗工艺中有五道工序,就设置五个清洗头对五个扎啤桶同时作业,完毕后,在短时间内使五个桶顺次改变位置。这样,当五道工序完成好后,五个桶就清洗完毕了。基于这种思路,设计了一套新的并联式扎啤桶清洗设备。
3.2 并联式扎啤桶清洗机的系统结构
本套设备共包含三大部分:液压系统(清洗泵系统部分)、电气控制系统和机械本体部分。
3.2.1 清洗机液压系统设计
液压系统包括清水泵、热碱水泵和水泵以及管路及其附件,以及气动阀门。
3.2.2 清洗机电气系统设计
电气系统以腾控PLC为,包括腾控T910 PLC、电磁阀、光电传感器、交流接触器、电机等,实现电控制气,从而气控制气或气控制液的气、电、液相互控制的电气控制方式。
在本电气系统中需要4个开关量输入和5个开关量输出。腾控T910具有12个开关量输入和8个开关量输出满足基本的IO口需求,同时,T910能够适应不同恶劣环境,具有较宽的温度使用范围。
3.2.3 清洗机机械本体设计
机械本体部分主要包括旋转工作台、清洗头部件、机架及驱动电机等。旋转工作台由桶托和桶托支架组成,其中桶托用来固定扎啤桶,而桶托支架用来固定6个桶托,呈360°均布。清洗头部件是由5个清洗头和清洗头托架组成,托架呈圆环形,5个清洗头按60°用螺栓连接在清洗头托架上,另外一个60°位置是空位,留作装、卸扎啤桶用,以实现非停机生产。电机经联轴器、驱动轴与旋转工作台相连。
1.扎啤桶桶托 2.卡具(12个)3.软管接头 4.清洗头托架 5.气缸 6.联轴器 7.机架 8.齿轮减速电机 9.电机安装附件 10.机架附件 11.清洗头 12.轴 13.桶托支架
3.3 并联式扎啤桶清洗设备的工作过程
如图5所示,本清洗设备设有6个工位,分别为空位、排残酒、进出清水、进出热碱水、进出水、二氧化碳背压。当六个桶均按放在旋转工作台上,按下启动按扭,电机带动旋转工作台转动,当扎啤桶盖与清洗头对正时,传感器检测到该位置,电机停转,从启动到到正确位置需要0.5-1秒。桶与清洗头对正后,即电机停转的同时气缸推动清洗头托架带动5个清洗头同时上升,上升时间为0.5-1秒,清洗头同时对5个桶进行作业(除了空位上的桶)。清洗头1气冲排残酒,需要4秒;清洗头2高压清水冲4秒,气冲排水7秒;清洗头3高压热碱水3秒,气冲排热碱水6秒;清洗头4高压进水4秒气冲排水7秒;清洗头5进行二氧化碳背压需要6秒,故这5个清洗头作业长时间为4秒加7秒为11秒,即公共周期为11秒。11秒后清洗头下降需0.5-1秒,清洗头下降后电机带动旋转工作台旋转60°被传感器检测到,这需要0.5-1秒,故折合清洗一个桶的时间为18-20秒,因此该清洗设备每小时可清洗180-200个桶。
4 结束语
本文采用北京腾控T910系列PLC,对现行扎啤桶清洗机进行重新设计,提出了并联清洗方法。并联式扎啤桶清洗机和现行的清洗设备率比为200/120。若当工人人数相同,在工时也相同的情况下,并联式扎啤桶清洗机的清晰效率将比现行的提高3-4倍,有效缓解了现行扎啤桶清洗设备效率低的状况。

1、概况
涌溪三级和东固机组位于同个厂房,涌溪三级装机2×20MW,东固装机1×12MW,涌溪四级装机2×11MW,电站按“无人值班”(少人值守)原则设计。现在用的是水科院H9000计算机监控系统,分成现地控制层、厂站控制层、梯调控制层,系统早投入运行的已10年。H9000计算机监控系统采用分布式结构,将现地控制层依据现场设备分成一个一个单元,每个单元建立相对立LCU,目前智能设备的通讯采用扩展串口接至工控机。
2.涌溪水电厂现有LCU结构及改进的必要性
涌溪水电厂现在使用的LCU结构是以工控机为网络接口的,主要由工控机、PLC可编程控制器、自动准同期装置、转速装置、温度巡检、交流采样装置、电源等附件组成。工控机作为计算机监控系统内部网上的一个结点,各种数据经过工控机送到网上各个结点,控制命令经工控机下达到控制器等设备。因此工控机的性显得非常重要。虽然工控机是工控产品,但由于它的风扇、硬盘驱动器、软驱等旋转部件的存在,性就有所降低,而且各部件现已老化,现在备品备件也难以购买。针对这种情况,涌溪水电厂考虑对监控系统进行技术改造,应用PLC的直接上网模式,取消原有的工控机,现场增加一台触摸屏以方便现地查看与操作。
3.PLC直接上网的结构模式下智能设备接入方式探讨
采用PLC直接上网的结构,妥善解决PLC直接上网后智能设备的接入问题。采用直接上网的结构,坚持分层分布(单元)式的结构原则,就是要达到与LCU有关的各种数据采集和控制都由LCU来实现的目标。LCU需要与一定数量的智能设备进行通讯。在有工控机结构的LCU结构中,通讯实现是比较容易的,通讯的方式也比较灵活。
但在采用PLC直接上网的结构后,就考虑各种PLC产品特性对接入LCU智能设备的影响。PLC与工控机相比,通讯接口少,方式比较少。
LCU智能设备接入问题,解决的总的方法有两种,一种是直接或经转换接入PLC,另一种是直接接入以太网。由于各种PLC产品分别产于不同的公司,它们的特性也各不相同,因此实现智能设备接人PLC的方法有多种多样。在比较国外主要PLC产品特性基础上,在满足分层分布(单元)式的结构原则前提条件下,对智能设备接人LCU的方法进行分析对比,从它们的特性中,力图找出共性的方法,侧重于通讯速率、实现方式、是否需要编程、接入智能设备的数量、是否易于维护等方面。
3.1直接接入PLC
每种PLC CPU上的串口或一般通讯模块的串口所支持的普遍方式是从(Slave)方式,即使它支持主(Master)方式,相应通讯协议也是专有协议,不是开放的协议。对于一些PLC如GE90系列PLC,它有一种模块该模块通讯方式为主方式。可以使用不同通讯协议编程,与智能设备通讯,这是解决方法之一。
这种方法智能设备与PLC的数据交换的速率是串口的速率,智能设备采集的数据可以在PLC控制流程中使用。设备通讯协议一致且数量不多时,比较适合这种方式。因为智能设备多,总的通讯速度就会较慢,通讯协议不一致,就会占用该模块较多内存。
3.2通过现场总线直接接入PLC
对于部分PLC,一些智能设备可以通过现场总线直接接入PLC。这种方式较好,因为现场总线的方式,其性、速率与直接插入PLC机箱的模块是相同的,而且接入的地点比较灵活,距离可以比较远。这种方式不需要编程。可以介入较多设备,非常方便,是一种很好的方法。参见结构图一。
3.3间接接入PLC
直接接入PLC的方法不具有普遍性,不是每一种PLC都可以实现的。下面两种方法可以在大范围使用。尤其是经串口转换接入PLC的方法,是一种普遍的方法。
3.3.1经串口转换接入PLC
PLC一般具有丰富的通讯模块可供选择,多数PLC的CPU模块具有一到两个串口。由于这些串口多支持从(Slave)方式通用协议,智能设备也多为从方式,两者通讯不能实现。有些串口虽支持主(Master)的通讯方式,但通讯协议多为不公开的专有协议,智能串口设备很少能支持这些协议。因此,解决方法之一是采用一种装置,它一侧接入PLC串口,另一侧接人智能设备。该装置起协议转换作用,而且它对两侧都可以是主方式。这种方式可以接入较多串口设备。这是一种很有前途的、比较经济的方式,可以适用每一种PLC产品。
3.3.2经转换接入现场总线进入PLC
为了解决PLC串口从方式不能直接接入PLC的问题,有些PLC厂家如施耐德,它开发一种网桥装置,一边接串口设备,一边接PLC的现场总线MB+。它有两种,一种支持同一种开放的协议如MODBUS,不需编程,另一种支持各个串口协议可以不同,但需要编程。参见结构图二。
3.4串口设备经转换(不经PLC)上网
几种方法都直接或间接通过PLC接入智能设备。现在,通过一种串口以太网转换器装置(如MOXA公司生产的串口转换装置),它的一侧接入串口设备,另一侧接入局域以太网。串口设备侧不需任何改变,上位系统直接采集串口设备的信号。这样一个LCU需要有几个IP地址。这种方式可以接入大量的智能设备。是一种很有前途的方法。
3.5智能设备直接接入以太网
随着时间的推移,越来越多的设备将可以直接上网,因此可以采取智能设备直接上网的方式;速率可达到10Mbps或100Mbps,将会很有应用前景。但一个LCU需要有几个IP地址。
(1)智能设备以直接接入PLC现地总线方式从比较好,因为应用简单、速率陕等,在可以选择直接接入现场总线的设备时,尽量采用这种方式。
(2)智能设备经串口转换接入PLC方式,是一种较优的方法,它虽然与PLC产品有关,但可以在每种PLC产品上使用,接人智能设备数量也较多,经济性能也较好。
(3)智能设备经串口转换上网方式和智能设备直接上网方式是很有应用前景的两种方式。因为这两种方法都与具体的PLC产品无关,是一种具有普遍意义的方法,值得引起注意。
4.结束语
结合涌溪水电厂实际需要,经过经济性、性、易维护性对比,终选用了南瑞自动控制有限公司的监控产品,智能设备采用经串口转换通讯管理机SJ30接入PLC方式进行技术改造,SJ30装置上送PLC的各类型数据格式符合南瑞自动控制有限公司的PLC与上位机机通信标准协议V3.0.5的规定,PLC程序仅完成转发功能,数据的解析由上位机驱动程序完成,节省了PLC的CPU资源,sJ30的串口比较多,能满足智能设备较多的要求。
各工程的智能设备具体采用何种方式接控系统,要结合工程项目的具体需要及投资,加强现地控制单元(LCU)结构研究,选择适合自身的接入方式进行设计改造,终达到有利于提高LCU的性、稳定性、免维护性,有利于水电厂创建水电厂,实现“无人值班,关门运行”的目标。
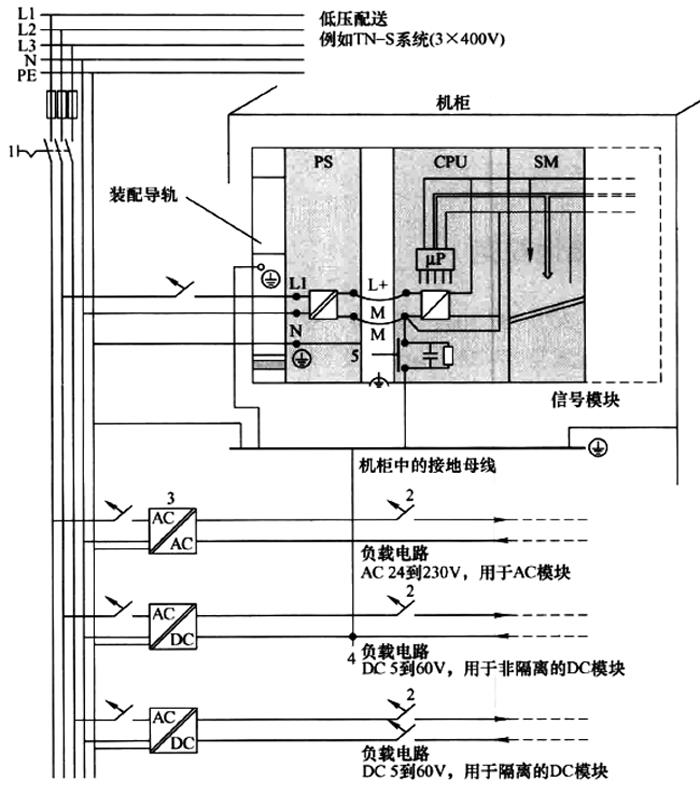
用一根大截面铜母线(或绝缘电缆)连接各装置的柜体接地点,然后将接地母线直接连接接地。接地线采用截面大于 22mm2 的铜导线,总母线使用截面大于 60mm2 的铜排。接地的接地电阻小于 2?,接地埋在距建筑物 10 ~ 15m 远处,且 PLC 系统接地点与强电设备接地点相距 10m 以上。信号源接地时,屏蔽层应在信号侧接地;不接地时,应在PLC侧接地;信号线中间有接头时,屏蔽层应牢固连接并进行绝缘处理,一定要避免多点接地;多个测点信号的屏蔽双绞线与多芯对绞总屏电缆连接时,各屏蔽层应相互连接好,并经绝缘处理。选择适当的接地处单点接点。在 PLC 控制系统中,具有多种形式的“地”,主要有:
信号地:是输入端信号元件-传感器的地
交流地:交流供电电源地 N 线,通常是产生主要噪声的地方
屏蔽地:一般为防止静电、磁场感应而设置的外壳或金属丝网,通过专门的铜导线将其与地相连。
保护地:一般将机器设备外壳或设备内立器件的外壳接地,用以保护人身和防护设备漏电。
以上几种情况现场没有解决好可以选适合自己使用的隔离器产品解决共地干扰问题。
4.2 DCS 系统的接地:计算机控制系统中的“地”有两类。其一是设备的外壳及屏蔽层,通常与大地相连。接地的目的一是避免机壳带电而影响人员及设备的,二是保持机壳及屏蔽层与大地等电位,起到屏蔽外部电磁场干扰的作用。另一类是电源或信号的参考地位。在微机控制系统中,即有模拟量信号,又有数字量信号,还有电源(直流)电压的地端。这些信号的地终就是直流电源的地。为防止公共阻抗产生的干扰,采用“汇流条分别走线”进行处理,即在电路中把模拟地与数字地分开,采用汇流条分别走线,终在一点把两个地接在一起。信号的屏蔽层采用单点接地原则,可以防止不同接地点之间的电位差(Ucm)通过屏蔽层形成电流回路,产生干扰。
不同型式的 DCS 系统对接地要求不同,但归根结底是满足“一点接地”的要求。整个接地系统终只有一点接到接地网上,并满足接地电阻的要求。DCS 系统的接地要求应该是确定的、完整周全的,不能为迎合用户的不同要求而改变。
电厂环境下,要求 DCS 有较强的抗干扰能力,用户希望接地方式及接地电阻的要求宽松一些。 但只有严格按厂家要求实施系统接地,才可保证系统稳定运行,也方便在某些故障情况下尽早排除不良接地因素。
下面以XX电厂控制系统(Symphony)接地特点为例进行分析:
本工程不设置单的 DCS 接地系统,Symphony 系统的过程控制柜之间通过接地电缆串联,终点由电源机柜处单点接到电气接地网,接地点半径 5 米内无大电流、电压启停设备的接地点,要求整个接地线缆至接地点的电阻小于 5Ω。从电源至分配盘及从分配盘至模件柜的供电电缆应使用3芯电缆,分别作为火线、中线和地线,中线与地线在电源出口处短接,并将此短接点使用扁平接地铜缆连接到近的的建筑接地系统上(见注 2),除此以外中线和地线在其他任何地方都不应再短接。使用双路电源时,两个电源在同一点接地。
4.2.1 Symphony 系统中,无论是单元机组的环路设备还是公用系统环路设备,其接地均较为简单。即使其物理位置分散,也不需要单的接地网。Symphony 系统的接地系统包括两部分:一路为交流地(地)系统,它为故障和高频噪声提供了一个低阻抗的排泄通道,并使设备外壳保持与地等电位,保证人员不受电器伤害。一路为直流地(信号地)系统,它为数字式过程控制系统建立一个零参考电位,同时能有效高频噪声。
4.2.2 接地使用厂内的地网地,它是与大地良好接触的导体,通常使用埋入地下的—根或一组 铜棒。SYMPHONY 系统要求接地的电阻小于 5 欧姆。接地距建筑物及接地之间的距离应不小于接地的长度;与建筑地或其他地要大于 5 米;距离避雷针地、大型电力设备的地,大型开关设备、旋转机械或其它干扰源应大于 10 米。地上不能连接其它设备。在严寒地区,接地延伸到冻土层以下。
4.2.3 连接控制系统与接地的接地导体使用多芯绝缘铜导线,在 150 米电气距离内,接地线的截面参见相关要求。用户应根据现场的具体情况决定。
4.2.4 接地导线与地不要使用螺栓连接,应该采用焊接方式。以避免振动、腐蚀、金属热胀冷缩等造成接触不良。Symphony 系统内各机柜柜体应与金属安装底座有的电气连接(可采用焊接法安装机柜或螺栓连接辅以点焊),金属安装底座与整个建筑的接地系统有的连接。
4.2.5 SYMPHONY 系统要求采用立的 220VAC 供电电源。即当采用厂用电源或保安电源供电时,用户应加隔离变压器。在分配盘的电源进线处,接地线与中性线须短接,接地线与火线、中线同时布线接至 SYMPHONY 系统用电设备的接线端子。
4.2.6 对于没有电源输入的设备,如 I/O 端子柜,应用采绝缘铜导线将机柜接地螺栓与其供源 的相邻模件柜的接地螺栓相连。机柜安装底座应与机柜等电位。
4.2.7 交/直流接地可共用一个接地,当采用二个接地时,其间的电阻应小于 l 欧姆。各控制柜的交流地、直流地分别以星形接地方式汇集,后接入同一地网(本工程为全厂电气接地网)。接地电阻要求小于5 欧姆。
4.2.8 在机柜底部有直流公共排以供连接直流接地,此直流公共排在机柜内与交流地和机柜是隔离的。以与直流接地相连的接地排为,星型连接各个模件柜的直流公共排。各端子柜与其相应的模件柜也用星型接法连接。
4.2.9 在有远程布置的机柜的系统中,远程机柜可使用自己的接地,但接地要求是一致的,该接地应与 DCS 主接地在同一个地网上。
4.2.10 统外部信号接线和屏蔽线与接地有关。屏蔽线应该只在单端接地,在机柜侧接地时接至机柜两侧的屏蔽棒上,该屏蔽棒与交流地连接在一起。
5 总结
控制系统中的干扰是一个十分复杂的问题,因此抗干扰措施通过合理的设计或电路中加装隔离器使之有效地抑制干扰、抗干扰,对有些干扰情况还需做具体分析,采取对症的方法,才能够使控制系统正常工作
通用控制产品的“客制化”已是一种趋势。所谓客制化,就是面向特定的行业应用,提供的控制产品,这就是控制器。
控制器可以是物理封装的单元产品,也可以是由单元产品组合而成的系统。不论哪种形式,控制器的不在硬件,而是在其行业应用软件功能块。对系统产品而言,得益于主流供应商统一软件架构体系的实施。
在通用控制(GC)与嵌入式控制(EC)的竞争中,行业KNOWHOW无疑是通用控制产品供应商的优势。基于深耕多年的经验,通过集成行业应用需求,为用户提供面向应用、减少二次开发成本的产品,是通用控制领域的一大进步。
因此控制器体现出了强烈的行业属性,这表现在控制器一般应用于“窄缝”市场,相对封闭。虽然控制器已经在很多细分市场领域了相当的市场份额,比如塑料机械、电梯等。但是每个细分市场的控制器供应商都是不同的。比如塑机的供应商主要是:珊星、宏讯、盟立等;而电梯行业的供应商主要是新时达、蓝光等。
至于小型PLC与控制器的优劣,则很难一言以蔽之。可以肯定的是,随着用户个性化需求的不断涌现,控制器将在多的窄缝市场侵占小型PLC的市场空间,但是短期内远远无法撼动小型PLC的主流控制地位。而小型PLC的厂商也在不断的用开发行业模块、降价、升级产品等方式捍卫自己的市场空间。